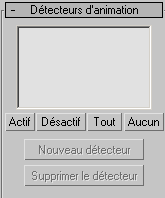
Le panneau déroulant Détecteurs d'animation de l'utilitaire Détecteur de caméra permet de définir et de contrôler les détecteurs de fonctions image. La liste de tous les détecteurs créés est dressée ici. Elle comprend, pour chacun, une coche d'activation, le numéro de détecteur, le nom de l'objet du point de la scène associé et l'intervalle des images actives. Pour sélectionner un détecteur, cliquez sur son nom dans la liste. Le groupe de fonctions procure également des commandes pour la détection des sous-pixels.
-
 Groupe de fonctions Utilitaires > panneau déroulant Utilitaires > bouton Autres > boîte de dialogue Utilitaires > Détecteur de caméra > panneau déroulant Détecteurs d'animation
Groupe de fonctions Utilitaires > panneau déroulant Utilitaires > bouton Autres > boîte de dialogue Utilitaires > Détecteur de caméra > panneau déroulant Détecteurs d'animation
Interface
- [Liste d'objets]
- Affiche les objets faisant l'objet d'une détection.
- Actif
- Lorsque cette option est activée, la détection sera effectuée dans l'image lorsque vous déroulez le film pas à pas dans le Movie Stepper (Déroulement pas à pas du film) ou lorsque vous exécutez une piste complète. Un X apparaît dans la liste des détecteurs lorsqu'il est activé.
- Inactif
- Quand le détecteur est désactivé, il se met au niveau de la position connue la plus proche qui se trouve avant l'image actuelle. Etant donné que la détection des motifs caractéristiques réclame de nombreux calculs, il est parfois utile de désactiver les détecteurs que vous n'employez pas afin d'accélérer le déroulement pas à pas du film.
- Tout
- Active tous les détecteurs.
- Aucun
- Désactive tous les détecteurs.
- Nouveau détecteur
- Crée un nouveau détecteur de motifs caractéristiques de films. Cette option place un gizmo du détecteur de motifs caractéristiques au centre de la fenêtre Film et une nouvelle entrée dans la liste des détecteurs. Le nouveau détecteur prend en charge les paramètres affichés dans Configuration du détecteur. Vous pouvez modifier ces paramètres après avoir créé le détecteur, mais il est souvent utile de définir le paramètre Déplacement maximum par image avant de créer le nouveau détecteur, car ceci établit automatiquement une limite de recherche initiale pour le gizmo du détecteur.
- Supprimer le détecteur
- Supprime le détecteur sélectionné de la liste et de la fenêtre de film.
Zone Configuration du détecteur
Pour assurer la configuration du détecteur sélectionné. Tout détecteur que vous créez obtient ses paramètres initiaux à partir des valeurs courantes qui figurent dans cette zone.
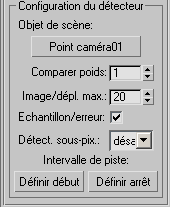
- Objet scène
- Associe un détecteur à un objet point de la scène qui correspond au motif caractéristique de l'image dans la fenêtre Film. Lorsque vous appuyez sur ce bouton, 3ds Max passe en mode standard de choix des objets. Lorsque vous avez sélectionné l'objet, l'entrée dans la liste des détecteurs et le texte qui figure dans le bouton sont remplacés par le nom de l'objet sélectionné. Vous pouvez modifier l'objet connecté à tout moment en appuyant sur ce bouton.
Il est recommandé d'utiliser des objets point ou des objets assistants Point caméra, bien que tout autre objet 3ds Max puisse être utilisé. Le détecteur utilise le point de pivot de l'objet sélectionné comme point de référence de corrélation pendant les calculs de reproduction des mouvements.
Lorsque vous configurez un projet de détection, le détecteur peut être configuré pour enregistrer les paramètres dans un fichier de configuration .mot. L'association entre le détecteur et l'objet du point de la scène que vous avez configuré à ce niveau est enregistrée sous un nom d'objet de scène. Si vous rechargez le film dans le détecteur, l'association de l'objet est rétablie à l'aide du nom de l'objet. Ceci signifie que vous devez attribuer des noms uniques aux objets point, faute de quoi des associations incorrectes pourraient être établies. De plus, vous devez charger la scène de travail dans 3ds Max avant d'ouvrir le film dans l'utilitaire Détecteur de caméra pour que les objets nommés puissent être détectés. S'il vous arrive d'ouvrir tout d'abord le film, les noms des objets figurant dans la liste des détecteurs afficheront tous <none>. Il suffit simplement de rouvrir le film dans le détecteur qui établira les connexions correctement.
- Comparer poids
- Définit la priorité de correspondance de la caméra séparément pour chaque détecteur. Utilisez cette option pour améliorer la précision de la reproduction pour des motifs caractéristiques de l'image situés à proximité d'un emplacement où sera inséré un élément graphique généré par ordinateur. Cela permet de réduire le glissement et le bruit dans cette partie de la scène.
L'algorithme de reproduction de mouvements ajuste la caméra pour réduire l'erreur entre les objets des motifs caractéristiques tels qu'ils sont vus par la caméra et leurs points motifs caractéristiques associés dans le plateau du film. Lorsque tous les poids ont la valeur 1, l'algorithme répartit l'erreur de façon aléatoire entre toutes les projections des objets et leurs motifs caractéristiques de détection. Si vous poussez le coefficient de correspondance d'un détecteur, il redistribue l'erreur au bénéfice de ce détecteur en réduisant la distance entre le motif caractéristique de ce détecteur et la projection des objets, tout en augmentant éventuellement l'erreur sur les autres détecteurs. Si vous poussez les poids sur 2 ou plusieurs motifs caractéristiques, le verrouillage peut se réduire progressivement, puisque l'algorithme répartit les améliorations entre les détecteurs de poids élevé. Utilisez des poids compris entre 2 et 6 pour obtenir un verrouillage adéquat.
- Image/déplacement maximum
- Cette option définit le nombre maximum de pixels que le motif caractéristique détecté déplace d'une image à l'autre sur tout l'intervalle de détection, et crée une boîte d'encadrement de recherche des mouvements pour les détecteurs nouvellement créés. Ceci peut être également configuré de façon dynamique en ajustant la boîte d'encadrement de recherche des mouvements directement dans la fenêtre Film.
- Echantillon sur erreur
- Le détecteur peut être configuré pour identifier les erreurs éventuelles de détection, option que vous pouvez utiliser lorsque vous passez en revue la détection manuellement et lors de la détection réelle pour corriger les erreurs. Les erreurs proviennent habituellement de renvois d'une image à l'autre supérieurs à l'encadrement de recherche, de modifications de contraste des images ou d'un motif caractéristique qui change de forme sur une séquence d'images, comme cela peut être le cas pour un angle situé à proximité du mouvement d'une caméra. Le détecteur d'erreurs est contrôlé par des seuils de mesure définis dans le panneau déroulant Seuils d'erreurs.
Lorsque vous placez un gizmo sur une image, une image clé est créée et une nouvelle image de motif caractéristique cible est échantillonnée sur l'image en question qui doit être recherchée dans les images suivantes. Lorsque l'option Nouvel échantillon sur erreur est activée, le détecteur détecte les erreurs au cours de la détection. En cas d'erreur, il enregistre la dernière image correcte et place à cet endroit une nouvelle image clé, produisant l'échantillonnage d'une nouvelle image de motif caractéristique cible au niveau de cette image, et continue la détection à partir de celle-ci.
- Détect. sous-pix.
- Normalement, un motif caractéristique d'image ne se déplace pas d'une image à l'autre selon un nombre entier de pixels. Toutefois, avec la détection au niveau du pixel, l'approximation la plus proche du centre d'un motif caractéristique est toujours située à la frontière d'un pixel. Ceci peut conduire à des erreurs de correspondance de caméra. Avec la détection au niveau sous-pixel, vous pouvez faire un zoom sur un motif caractéristique et positionner son gizmo dans un pixel. De ce fait, le détecteur essaie d'effectuer une détection à cette résolution en super échantillonnant l'image cible et les limites de recherche, améliorant ainsi la précision de la correspondance.
Vous pouvez activer la détection de niveau sous-pixel pour chaque détecteur en choisissant un niveau dans le menu déroulant Détection de sous-pixels du panneau déroulant Détecteurs d'animation. Cette option définit la résolution à laquelle la détection des motifs caractéristiques est effectuée dans le détecteur, jusqu'à 1/32eme de pixel.
Deux choses se produisent lorsque vous sélectionnez un niveau de sous-pixel :
- La grille au-dessus de laquelle vous pouvez positionner le gizmo d'un détecteur dans une fenêtre image est ajustée au nouveau niveau du sous-pixel. Le gizmo peut être positionné à l'intérieur des pixels dans les vues sur lesquelles un zoom a été effectué. Vous pouvez effectuer un zoom avant sur un gizmo du détecteur en le sélectionnant et en appuyant sur la touche I ou O qui vous permet d'effectuer soit un zoom avant soit un zoom arrière.
- La recherche des motifs caractéristiques est exécutée sur des versions des motifs caractéristiques des images cible agrandies de façon interne et sur des parties de la fenêtre de recherche. Ces versions sont agrandies selon un facteur inversement proportionnel au niveau de sous-pixel à l'aide d'une interpolation bicubique, permettant ainsi au détecteur de motif caractéristique d'effectuer une recherche à ce niveau de pixels mis à l'échelle.
Quand vous positionnez manuellement les gizmos au niveau des images clés, il est crucial d'effectuer un zoom avant suffisant pour pouvoir placer le gizmo au centre du motif caractéristique selon le degré de précision autorisé par le niveau de sous-pixel sélectionné. Dans le cas contraire, le détecteur ne pourra pas effectuer une détection du centre adéquat à la résolution sélectionnée.
Conseil : bien que la détection du motif caractéristique soit, dans un premier temps, effectuée en se calant sur le pixel le plus proche selon un pas d'un pixel entier, puis effectué au niveau du sous-pixel dans cet intervalle d'un pixel, la durée de la détection peut augmenter considérablement (de façon inversement proportionnelle au carré du niveau de sous-pixel). Pour cette raison, il est recommandé de donner au niveau de sous-pixel une valeur aussi faible que possible. Normalement, 1/8ème de pixel convient pour des motifs caractéristiques qui sont bien dispersés autour de la scène. Utilisez des niveaux supérieurs si les motifs caractéristiques sont relativement rapprochés les uns des autres, ou effectuez un déplacement de façon lente à l'intérieur de l'image.Vous pouvez également réduire les durées de détection en rétrécissant au maximum la boîte intérieure d'encadrement des motifs caractéristiques dans le gizmo, tout en conservant une paire de pixels pour le contraste du décor. Les durées de recherche sont proportionnelles à la taille de la boîte d'encadrement des motifs caractéristiques.
- Intervalle de piste
-
Utilisez cette option lorsqu'un motif caractéristique sort de l'écran ou s'il n'est pas visible dans la fenêtre Film.
Définir le débutConfigure le début de l'intervalle actif des images pour un détecteur.
Définir la finConfigure la fin de l'intervalle actif des images pour un détecteur.
Utilisez les boutons Définir début et Définir arrêt de la zone Configuration du détecteur conjointement au panneau déroulant Progression pas à pas du film pour définir l'intervalle actif. Lorsque vous appuyez sur les boutons, vous définissez le point de départ ou d'arrêt au niveau de l'image affichée dans Film pas à pas.
Images clés du détecteur et données de position
Chaque fois que vous placez manuellement le gizmo d'un détecteur, au niveau de la première image ou d'une erreur de détection, par exemple, une position d'image clé spéciale est créée. Le détecteur ne tente jamais de repositionner ces images clés, mais il les utilise comme points de départ pour les images qui les suivent jusqu'à l'image clé suivante. Sur les images clés, vous pouvez ajuster la position et les motifs caractéristiques ou l'encadrement de recherche.
Au cours de la détection, le motif caractéristique sur une image clé est échantillonné et devient la cible de recherche pour les images ultérieures. L'utilisation d'un encadrement de recherche ajusté jusqu'à l'image clé suivante fournit le point de départ, le motif caractéristique cible et la boîte d'encadrement de recherche pour les images qui suivent.
Les données de position pour chaque image dans chaque gizmo peuvent correspondre à :
- une image clé, définissant une nouvelle position de départ, une image de motif caractéristique cible et une boîte d'encadrement de recherche ;
- une position détectée ;
- des données inconnues.
Toutes les positions d'image, à l'exception de la première, sont initialement inconnues et recevront un nom au fur et à mesure de la progression de la détection ou du positionnement des gizmos. Lorsque vous définissez une image clé manuellement, toutes les positions précédemment détectées qui viennent à la suite de l'image clé en question jusqu'à l'image clé suivante sont supprimées et deviennent ainsi inconnues. Le bouton Détection terminée dans le panneau déroulant Piste par lot permet de rechercher des positions inconnues dans les détecteurs actuellement activés et d'effectuer la détection de ces images. Le bouton Vérifier l'état dans le même panneau déroulant permet de rechercher toutes les positions actuellement inconnues ainsi que les erreurs de détection. Reportez-vous à la rubrique Panneau déroulant Piste par lot.