このレッスンでは、アニメーション パスに沿って自動車が左右に動いたときに前輪が旋回する(左右に向きを変える)ようにコントロールを追加していきます。また、リアルなアニメーションにするためには、車輪の旋回とハンドルの回転を連動させる必要もあります。
レッスンの準備:
- 前のレッスンの結果を続けて使用するか、
 car_rig_04.max
を開きます。
car_rig_04.max
を開きます。
前輪用のヘルパーを設定する:
- トップ ビューポートで自動車を
 ズーム拡大し、F3 キーを押して[ワイヤフレーム](Wireframe)モードに切り替えます。
ズーム拡大し、F3 キーを押して[ワイヤフレーム](Wireframe)モードに切り替えます。 - メイン メニューから[作成](Create)
 [ヘルパー](Helpers) [ポイント](Point)を選択します。
[ヘルパー](Helpers) [ポイント](Point)を選択します。 - 車体の任意の場所をクリックし、ヘルパーを作成します。[パラメータ](Parameters)ロールアウトで[ボックス](Box)をオンにし、[サイズ](Size)ボックスに 50.0 と入力します。ヘルパーに Dummy_FL と名前を付けます。
- ヘルパーが選択されている状態で、このチュートリアルで作成した[myTools]ツールバーの[ListCon]ボタンをクリックします。
これで、前のレッスンで設定した位置リスト コントローラと回転リスト コントローラが自動的に割り当てられ、ヘルパーのローカル方向をコントロールできるようになります。
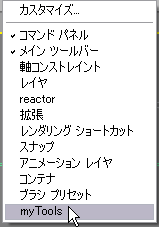
[myTools]ツールバーが表示されていない場合は、メイン ツールバーの空白の領域を右クリックし、メニューから[myTools]を選択してください。
- メイン ツールバーで
 ([位置合わせ](Align))をクリックし、トップ ビューポートで Chassis オブジェクトをクリックします。
([位置合わせ](Align))をクリックし、トップ ビューポートで Chassis オブジェクトをクリックします。 - [選択の位置合わせ](Align Selection)ダイアログ ボックス [位置合わせ](Align Position)領域で、[X 位置](X Position)、[Y 位置](Y Position)、[Z 位置](Z Position)をすべてオフにします。[方向位置合わせ](Align Orientation)領域で、[X 軸](X Axis)、[Y 軸](Y Axis)、[Z 軸](Z Axis)をすべてオンにします。
これで、自動車とヘルパーが同じ方向を向きます。
- [OK]をクリックしてダイアログ ボックスを閉じます。
 ([選択して移動](Select And Move))をアクティブにします。Shift+移動を使用して、新しいヘルパーのコピーを作成します。 ヒント: 座標系を[ローカル](Local)に設定すると、ポイント ヘルパーを移動しやすくなります。
([選択して移動](Select And Move))をアクティブにします。Shift+移動を使用して、新しいヘルパーのコピーを作成します。 ヒント: 座標系を[ローカル](Local)に設定すると、ポイント ヘルパーを移動しやすくなります。- [クローン オプション](Clone Options)ダイアログ ボックスで、コピーに Dummy_FR と名前を付けます。
次に、右前輪にヘルパーを位置合わせします。
- トップ ビューポートで、Chassis オブジェクトを
 選択して右クリックし、[選択を非表示](Hide Selection)を選択します。
選択して右クリックし、[選択を非表示](Hide Selection)を選択します。 - 新しいポイント ヘルパーを 選択します。メイン ツールバーで、 ([位置合わせ](Align))をクリックした後、Wheel_FR をクリックします。
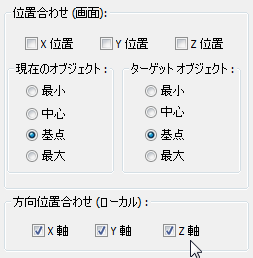
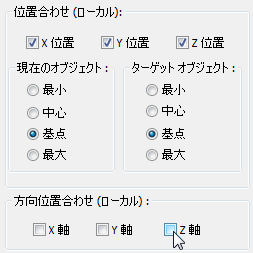
- [選択の位置合わせ](Align Selection)ダイアログ ボックス [位置合わせ](Align Position)領域で、[X 位置](X Position)、[Y 位置](Y Position)、[Z 位置](Z Position)をオンにします。
[現在のオブジェクト](Current Object)領域と[ターゲット オブジェクト](Target Object)領域の両方で[基点](Pivot)をオンにします。
[方向位置合わせ](Align Orientation)領域で、[X 軸](X Axis)、[Y 軸](Y Axis)、[Z 軸](Z Axis)をすべてオフにします。
- [適用](Apply)をクリックしてから、[OK]をクリックしてダイアログ ボックスを終了します。
- Dummy_FL を 選択します。 ([位置合わせ](Align))を再度クリックします。続いて、トップ ビューポートで Wheel_FL をクリックします。
- 手順 12 と 13 を繰り返して、左前輪にもヘルパーを位置合わせします。
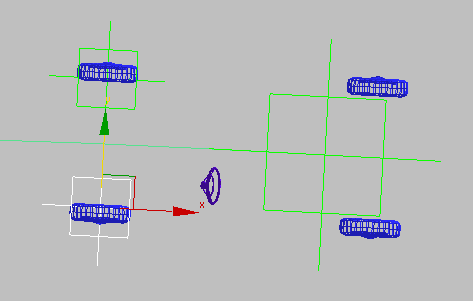
左前輪と右前輪にそれぞれのポイント ヘルパーを位置合わせした状態
次は、車輪を旋回する(左右に向きを変える)ことができるように、自動車の階層と親子関係を調整します。これらの手順は、次のレッスンで車体のローリングをリギングするための準備にもなります。
ポイント ヘルパーを使用して自動車のアニメーションをパスに拘束したように、さらにもう 2 つポイント ヘルパーを作成して、ハンドルの回転で運転したときの前輪の旋回をコントロールします。
車輪のヘルパーを自動車のヘルパーにリンクさせる:
- メイン ツールバーから
 ([選択してリンク](Select And Link))をクリックします。
([選択してリンク](Select And Link))をクリックします。 - Ctrl キーを押しながら 2 つの車輪のヘルパー オブジェクトを選択し、Dummy_CAR までドラッグします。
これで、車輪のヘルパーが Dummy_CAR オブジェクトの子としてリンクされます。
後輪を自動車のヘルパーにリンクさせる:
 ([選択してリンク](Select And Link))がアクティブな状態で 2 つの後輪(Wheel-RL と Wheel-RR)を選択し、Dummy_CAR ヘルパーまでドラッグします。
([選択してリンク](Select And Link))がアクティブな状態で 2 つの後輪(Wheel-RL と Wheel-RR)を選択し、Dummy_CAR ヘルパーまでドラッグします。
前のヘルパーを各車輪にリンクさせる:
- 左前輪(Wheel-FL)を Dummy_FL ヘルパーに リンクします。
左前輪を左前輪のヘルパーにリンクさせる
- 右前輪(Wheel-FR)を Dummy_FR ヘルパーに リンクします。
 ([オブジェクトを選択](Select Object))をクリックしてアクティブにし、[選択してリンク](Select And Link)を非アクティブにします。
([オブジェクトを選択](Select Object))をクリックしてアクティブにし、[選択してリンク](Select And Link)を非アクティブにします。
車体を表示する:
- ビューポートで右クリックし、クアッド メニューから[名前による表示](Unhide By Name)を選択します。[シーンから選択](Select From Scene)ダイアログ ボックスで、Chassis を選択して[表示](Unhide)をクリックします。
ワールド X 座標で車輪を回転させる:
- [Camera_Wall-E]ビューポート ラベルをクリックし、メニューから[カメラ](Camera) [Camera_Birdseye]を選択します。
- メイン ツールバーで ([選択](Select))をクリックしてアクティブにします。
- カメラ ビューポートでハンドル(SWheel)を選択します。
- ハンドルを右クリックし、[ワイヤ パラメータ](Wire Parameters)を選択します。
- メニューから[変換](Transform) [回転](Rotation) (2 番目の)[オイラー XYZ](Euler XYZ) [Z 回転](Z Rotation)を選択します。
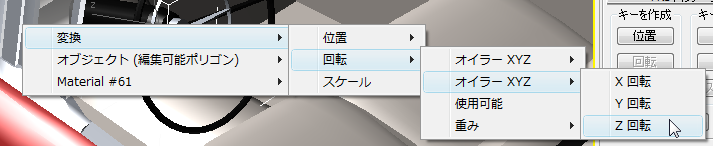
- Dummy-FL オブジェクト(左前輪のヘルパー)をクリックし、[変換](Transform) [回転](Rotation) (2 番目の)[オイラー XYZ](Euler XYZ) [Z 回転](Z Rotation)を選択します。

- [パラメータ ワイヤリング](Parameter Wiring)ダイアログ ボックスでコントロール方向を双方向に設定します。これで、どちらか一方のオブジェクトを回転させると、もう一方のオブジェクトも回転するようになります。
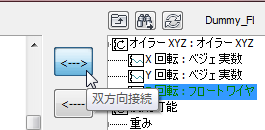
- [接続](Connect)をクリックします。[パラメータ ワイヤリング](Parameter Wiring)ダイアログ ボックスはまだ閉じないでください。
- メイン ツールバーで
 ([選択して回転](Select And Rotate))をクリックし、座標系を[ローカル](Local)に設定します。
([選択して回転](Select And Rotate))をクリックし、座標系を[ローカル](Local)に設定します。 
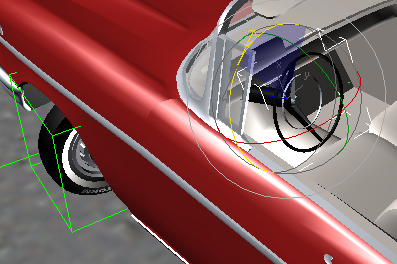
- ハンドルをローカル Z 軸を中心に回転させます。
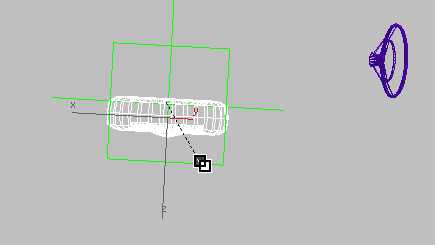
ハンドルを回転させると、前輪が反対方向へ旋回することが分かります。これは、コントローラの式を変更することで修正できます。さらにもう 1 つ問題があります。前輪の旋回は、ハンドルの回転よりもはるかに小さくなければなりません。前輪の旋回範囲は約 90 度までであるのに対し、ハンドルは 2 ~ 3 回転まで動かすことができます。
ハンドルの回転方向と前輪の旋回方向が逆の状態
- 前の手順で回転させたハンドルを
 元に戻します。
元に戻します。 - 左側の[式](Expression)パネル(「式: SWheel’s Z_回転」という文字列の下)に –Z_回転*8 と入力します。
- 右側の[式](Expression)パネル(「式: Dummy_FL’s Z_回転」という文字列の下)に –Z_回転/8 と入力します。
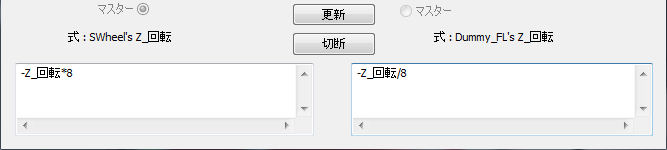
マイナス記号(-)演算子を付けることで 2 つの回転が同じ方向になり、さらに *8 と /8 によって左前輪の旋回(Z 回転)がハンドルの回転量の 1/8 になります。
- [更新](Update)をクリックしてから、再度ハンドルをローカル Z 軸を中心に回転させてみてください。
これで、ハンドルと車輪の動きがよりリアルになりました。
- 手順 4 ~ 14 を繰り返して、ハンドルと右前輪のヘルパーをワイヤリングします。(H キーを使用して右前輪のヘルパーを選択できます。)
なお、右前輪のヘルパーは左前輪のヘルパーをミラーリングではなくコピーして作成したものであるため、手順 12、13 とまったく同じ式にしてください。
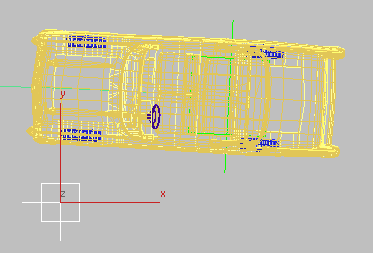
右前輪をワイヤリングした結果はトップ ビューポートで見ることができます。
-
 [パラメータ ワイヤリング](Parameter Wiring)ダイアログ ボックスを閉じます。
[パラメータ ワイヤリング](Parameter Wiring)ダイアログ ボックスを閉じます。
ハンドルをアニメートする:
- タイムラインが[フレーム:ティック](frames and ticks)表示になっている場合は、
 ([時間設定](Time Configuration))をクリックし、[時間設定](Time Configuration)ダイアログ ボックス [時間表示](Time Display)領域で[フレーム](Frames)をオンにします。
([時間設定](Time Configuration))をクリックし、[時間設定](Time Configuration)ダイアログ ボックス [時間表示](Time Display)領域で[フレーム](Frames)をオンにします。 
- トップ ビューをアクティブにしてから、F3 キーを押して[リアリスティック](Realistic)モードに戻し、
 ([全範囲ズーム](Zoom Extents))をクリックしてアニメーション パス全体を表示します。
([全範囲ズーム](Zoom Extents))をクリックしてアニメーション パス全体を表示します。 - フレーム 50 (自動車が最初のカーブの中ほどに差し掛かった辺り)に移動します。
- SWheel を選択して、メイン ツールバーで ([選択して回転](Select And Rotate))をクリックします。
 をオンにし、ハンドルを、Z 軸のステータス バーに –280 と表示されるまで回転させます。
をオンにし、ハンドルを、Z 軸のステータス バーに –280 と表示されるまで回転させます。 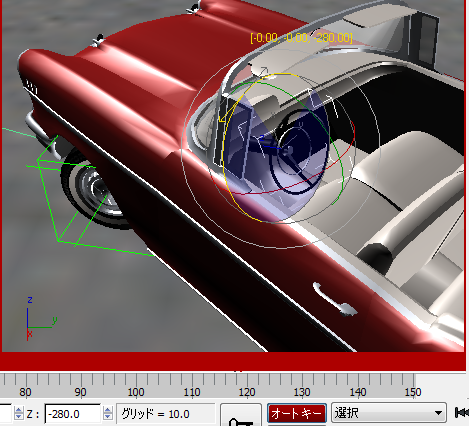
ハンドルを Z 軸を中心に -280 度回転させる
- フレーム 115 (自動車が 2 つ目のカーブの中ほどに差し掛かった辺り)に移動し、ハンドルを、Z 軸のステータス バーに 500 と表示されるまで回転させます。
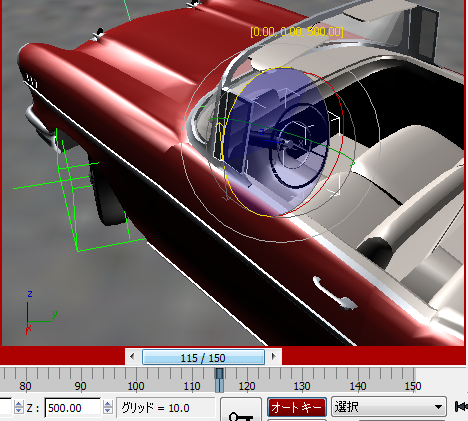
ハンドルを Z 軸を中心に 500 度回転させる
 アニメーションの最後に移動し、ハンドルを、Z 軸のステータス バーに –220 と表示されるまで回転させます。
アニメーションの最後に移動し、ハンドルを、Z 軸のステータス バーに –220 と表示されるまで回転させます。  をオフにしてから、作成したアニメーションをテストします。
をオフにしてから、作成したアニメーションをテストします。 - ファイルに mycar_rig_05.max と名前を付けて保存します。