ここでは、HI IK ソルバの追加コントロールを説明します。ここでは、IK ソルバ平面はターン角度で制御されており、直接アニメートしたりターゲット オブジェクトを使用してアニメートすることができます。
-
HI IK チェーンのエンド エフェクタを選択 >
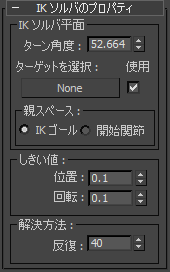
 [モーション](Motion)パネル > [パラメータ](Parameters)ボタン > [IK ソルバのプロパティ](IK Solver Properties)ロールアウト
[モーション](Motion)パネル > [パラメータ](Parameters)ボタン > [IK ソルバのプロパティ](IK Solver Properties)ロールアウト
[親スペース](Parent Space)領域で、ターン角度の親スペースとして IK ゴールと開始関節のどちらを使うかを選択できます。IK ゴールを選択すると(これが既定値です)、チェーンのターン角度がゴールの親スペースで定義されます。開始関節を選択すると、ターン角度は開始関節の親スペースに応じて変わります。こうしたオプションを利用すると、2 つの HI IK ソルバを持つチェーンでターン角度をうまく制御することができるようになります。たとえば、チェーン上部にある 1 つ目のソルバは、開始関節の親スペースでターン角度を使用でき、一方、チェーンの下部にある 2 つ目の IK ソルバは、IK ゴールの親スペースを使用できます。この場合、あるチェーンのターン角度を変更しても別のチェーンのターン角度は変更されません。
[しきい値](Thresholds)領域と[解決方法](Solutions)領域で IK ソリューションを調整することができます。[位置](Position)しきい値を使うとゴールをエンド エフェクタから離す限界を単位で設定し、[回転](Rotation)を使うと角度で設定します。
[解決方法](Solutions)領域の[反復](Iterations)には、IK ソリューションが実行をやめるまで反復する回数が表示されます。
IK アニメーションがジッターしているようであれば、[反復](Iterations)を 200 まで上げてみます。反復回数を増やすと計算時間が長くなりますが、よりよい結果をもたらします。
ターン角度のマニピュレータ
![]() このロールアウトのスピナーでターン角度を調整します。またはマニピュレータで調整することもできます。調整するには、[マニピュレータ](Manipulate)をオンにします。ターン角度マニピュレータがビューポートにハンドルとして表示されます。
このロールアウトのスピナーでターン角度を調整します。またはマニピュレータで調整することもできます。調整するには、[マニピュレータ](Manipulate)をオンにします。ターン角度マニピュレータがビューポートにハンドルとして表示されます。
ターン角度マニピュレータ
ターン角度マニピュレータ
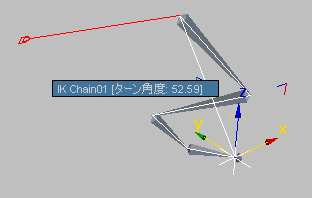
マウスをマニピュレータに移動すると赤色になります。この時点で、マニピュレータをドラッグしてターン角度を変更できます。このとき、[オート キー](Auto Key)ボタンをアクティブにすることができます。
また、ターゲット オブジェクトを使ってターン角度をアニメートさせることもできます。ターゲットのオブジェクトを選択し、オブジェクトをアニメートするとターン角度がアニメートされます。
ターン角度マニピュレータは標準的な平面アングル マニピュレータです。HI ソルバには、このマニピュレータを表示する独自のコントロールがあります。このコントロールは[IK 表示オプション](IK Display Options)ロールアウトにあります。
手順
IK ソリューションの精度を上げるには:
- HI IK チェーンでゴールを
 選択します。
選択します。 - [IK ソルバのプロパティ](IK Solver Properties)ロールアウトの[解決方法](solutions)領域で[反復](Iterations)を 200 に増やします。
- アニメーションを
 再生するか
再生するか  レンダリングします。
レンダリングします。 - [位置](Position)しきい値と[回転](Rotation)しきい値を小さくすることもできます。
インタフェース
[IK ソルバ平面](IK Solver Plane)領域
- ターン角度
- 人間の手足の膝や肘の方向を決めるソルバ平面を制御します。 ターン角度は、[表示オプション](Display Options)ロールアウトの[ターン角度マニピュレータ](Swivel Angle)にチェックマークを付けた後に、[操作モード](Manipulate Mode)にチェックマークを付けると、ビューポートで操作することができます。ビューポートにターン角度マニピュレータが表示されたら、ハンドルをインタラクティブにアニメートしてソルバ平面をアニメートできます。
- ターゲットを選択
- 別のオブジェクトを選択して、ターン角度をアニメートさせることができます。
- 使用
- ターゲットの使用のオンとオフを切り替えます。
- 親スペース
- ターン角度に関連するスペースを定義します。チェーン上で複数のソルバとともに使用すると、あるチェーンのターン角度マニピュレーションが次のマニピュレーションに影響を与えないようにできます。詳細は、「ホワイト ペーパー: HI IK ソルバのターン角度」を参照してください。
- IK ゴールIK ゴールに関連するターン角度の親スペースを定義します。
- 開始関節開始関節に関連するターン角度の親スペースを定義します。
[しきい値](Thresholds)領域
システムで計算する場合の許容範囲を定義します。
- 位置
-
ゴールがエンド エフェクタから移動できる限界を単位で設定します。低い単位に設定します。
- 回転
-
ゴールがエンド エフェクタから回転して離れる限界を角度で設定します。最良の結果を得るには、この値を小さくしておきます。
HI ソルバと IK リム ソルバの回転しきい値を調整しても、結果は変わりません。IK ソリューションで回転コンポーネントをサポートするかどうかは、プラグイン ソルバの方向によって異なります。
[解決方法](Solutions)領域
アニメーションの精度を制御するために使います。IK ソリューションのアニメーション表示を粗くしたりジッターさせる場合は、[反復](iterations)の値を増やします。
- 反復
- ゴールとエンド エフェクタの位置を最もよく合わせるために IK ソリューションが試行する回数です。アニメーションがジャンプするような場合はこの値を増やします。