CATMotion には、CAT の再ターゲットシステムも統合されています。この再ターゲット システムには、通常の IK と比べて 2 つのメリットがあります。1 つは、IK チェーンの過伸長によって膝関節が切れてしまうという問題を回避できること。そしてもう 1 つは、脚で骨盤が押し上げられることでキャラクタが自動的に「重み」付けされるという点です。
再ターゲットを行うと、脚を完全にまっすぐ伸ばすことができるため、IK では困難(あるいは不可能)な歩行も作成できます。
CATMotion では、再ターゲットは 2 つのコントローラ[膝の角度](KneeAngle)と[脚の重み](LegWeight))の組み合わせによって制御されます。
膝の角度
歩行サイクルは、4 つの膝の角度に分けられます。膝の角度の制御は、CATMotion エディタ内の[脚](Legs)の下にある、[膝の角度](KneeAngle)コントローラで行います。
明確にするために、4 つの膝の角度をLift、MidLift、Plant、MidPlantと呼びます。
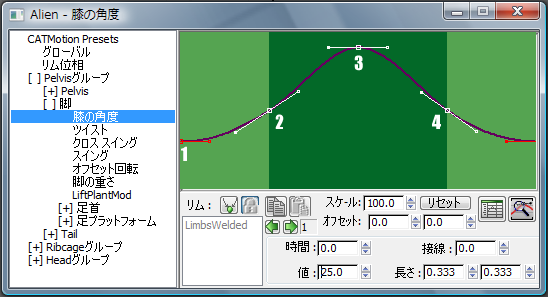
1. MidPlant
2. リフト
3. MidLift
4. 接地中
- MidPlant
-
Plant と Lift の間の膝の角度です。
- Lift
-
足が地面から離れようとするときの膝の角度です。
- MidLift
-
パスの中間、宙にある状態の膝の角度です。
- Plant
-
足が地面に戻ったときの膝の角度です。
脚の重み
再ターゲットに重要なもう 1 つのコントローラは、[脚の重み](LegWeight)です。[膝の角度](KneeAngle)と同様、CATMotion エディタ内の[脚](Legs)の下にあります。
[脚の重み](LegWeight)のグラフは、足のプラットフォームが地面にどのくらい引っ張られるかを制御します。[脚の重み](LegWeight)の値が 0 の場合、膝の角度を増加すると足が宙に高く引っ張られます。[脚の重み](LegWeight)の値が 1.0 の場合、膝の角度を増加すると骨盤が下に引っ張られます。
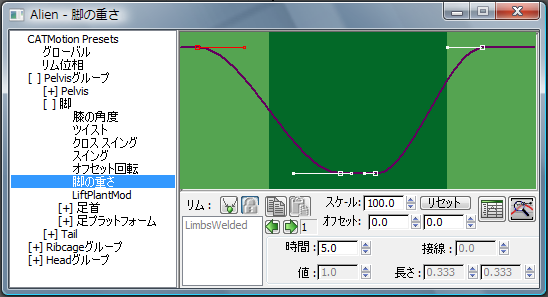
[脚の重み](LegWeight)は、脚の優先順位であると考えることもできます。グラフの左側は Lift 優先、右側は Plant 優先です。これは、強引に物理的に可能な範囲を超えた角度にしようとしたときに重要となります。その場合、脚の重みを調整して、一方の脚を設定し、もう一方をゼロにすることで、エラーが最も大きいところを制御できます。通常は、着地する脚の方を優先させるべきです。
システム内のエラーは足首で吸収されます。足首がまっすぐになる傾向があったり、動きが変だと思ったら、[脚の重み](LegWeight)または[膝の角度](KneeAngle)を調整してみてください。
通常、最初に試すべきことは、[最大歩幅 (長さ)](Length)の値を下げるか、いくつかの膝の角度を増加または減少することです。
動作が少しぎこちない場合は、[脚の重み](LegWeight)のグラフをスムーズにする必要があるかもしれません。足を上げるときに足首がまっすぐすぎる場合は、グラフの Lift 部分の[脚の重み](LegWeight)が長すぎる可能性があります。
走行と再ターゲット
再ターゲットは歩行には有効ですが、走行には適していません。現時点では、脚の重みが開放されて「跳躍」状態になる間の有効なブレンドが行えません。
そのため、走行やジャンプには IK を使用することを推奨しています。