足首コントローラには、[指のロール角度](DigitRollAngle)、[指の広がり角度](DigitSpreadAngl)、[指のカール角度](DigitCurlAngle)、[ターゲットの位置合わせ](TargetAlign)、[足のベンド](FootBend)があります。
-
[CATMotion エディタ](CATMotion Editor) >
 [階層](Hierarchy)パネル > 足首が属するハブ グループ階層を展開 > 編集するコントローラをクリック
[階層](Hierarchy)パネル > 足首が属するハブ グループ階層を展開 > 編集するコントローラをクリック
注: ここで取り上げる指のコントローラは、CATMotion レイヤが作成された時点で足首に 1 つまたは複数の指が設定されているリグでのみ使用できます(「手のひらと足首の編集」を参照)。
指のロール角度
[指のロール角度](DigitRollAngle)は、指のロール量を制御します。
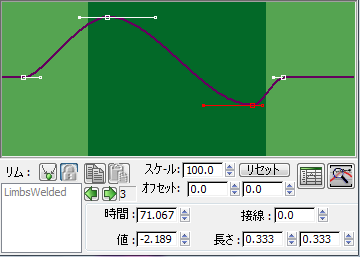
ヒント: [指のロール角度](DigitRollAngle)は[指の広がり角度](DigitSpreadAngle)と組み合わせて使用します。
指の広がり角度
[指の広がり角度](DigitSpreadAngle)は、サイクル中の指の広がりの量を制御します。
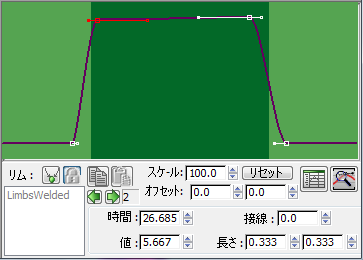
ヒント: [指の広がり角度](DigitSpreadAngle)は、恐竜などの、つま先で歩行する重い生物をシミュレートするのに役立ちます。足が地面から離れたら広がる角度を下げ、着地時に元に戻るようにアニメートします。
指のカール角度
指のカール角度コントローラは、サイクル中の指のカール量を制御します。
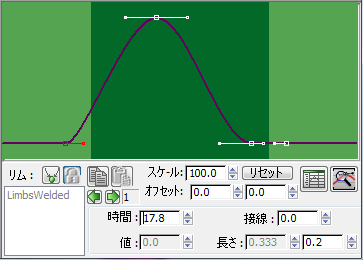
ヒント: 指のカール角度は、特にトカゲや鳥など、長い爪を持つ生物に役立ちます。
ヒント: 各指のカール量を制御するには、選択した指の設定での[カールの重み](Curl Weight)の設定を編集します。
ターゲットの位置合わせ
[ターゲットの位置合わせ](TargetAlign)は足首の基点位置を制御します。値 0.0 では、母指球(つま先の元)に基点が配置されます。値1.0 では、足首の関節部に配置されます。
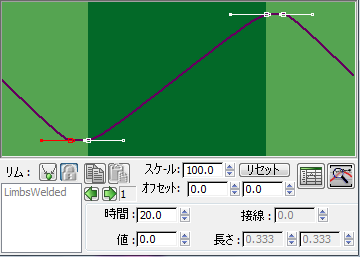
ヒント: 人間の場合、通常は Lift (足上げ)時にはつま先の元、Plant (着地)時にはかかとに基点があります。
通常、つま先で歩く生物(ほとんどの四足動物など)は、値はずっと 0.0 のまま、基点をつま先の元の位置にしておきます。
足のベンド
[足のベンド](FootBend)は足首の角度を制御します。
ヒント: 人間をアニメートするときは、足首が自然に上がるので[足のベンド](FootBend)は必要ありません([ターゲットの位置合わせ](TargetAlign)が正しいことが前提です)。
ヒント: これは、つま先で歩く生物での作業時に最も役立ちます。