팔과 다리를 편집하는 작업은 이 항목에서 설명하는 몇 가지 사소한 차이점을 제외하면 거의 동일합니다.
-
팔다리 골격 선택 >
 수정 패널 > 팔다리 설정 롤아웃
수정 패널 > 팔다리 설정 롤아웃
팔과 다리 간의 차이점
팔다리 만들기 버튼은 없으며 대신 팔이나 다리를 만드는 옵션이 제공됩니다. 그러나 팔과 다리 간의 차이점은 그다지 크지 않습니다. 다리의 경우 기본적으로 발 플랫폼(직사각형 IK 대상)을 사용하며, 원하는 경우에는 팔이 교차형 IK 대상 대신 발 플랫폼을 사용하도록 변경할 수 있습니다.
팔은 다리와 다른 허브에서 모션을 상속합니다. 팔은 흉곽의 회전을 상속하지만 측면을 가리키도록 회전하며, 다리는 기본적으로 아래쪽을 가리키도록 완전히 대칭 이동됩니다. 새 레이어를 추가한 다음 팔다리를 FK로 설정하고 모든 회전 값을 0으로 설정하면 이 차이점을 확인할 수 있습니다. 다리의 회전 각도는 다리가 연결된 허브와는 달리 180도이며, 팔의 회전 각도는 다리와 다른 90도임을 확인할 수 있습니다.
인터페이스
팔다리는 사용 가능한 여러 하위 요소로 구성됩니다. 여기에는 쇄골, 팔다리 골격, 손바닥 등이 포함됩니다. 팔다리의 마스터 매개변수는 팔다리 설정 롤아웃에 저장됩니다.
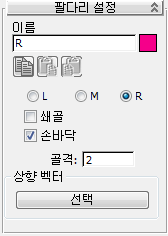
- 이름
-
필드 상자에서 팔다리 이름을 편집합니다. CAT의 이름 지정 시스템 사용을 참조하십시오.
- 색상 견본
-
팔다리 색상을 변경하려면 클릭합니다.
- L/M/R
-
팔다리가 왼쪽/중간/오른쪽 팔 또는 다리 역할을 하는지 선택합니다. 중간 팔다리는 삼각대 구조에서 유용합니다.
-
 복사/붙여넣기/미러 붙여넣기
복사/붙여넣기/미러 붙여넣기 -
팔다리 설정을 다른 팔다리에서 또는 다른 팔다리로 복사하고 붙여넣으려면 이러한 버튼을 사용합니다. 리그 부분 복사 및 붙여넣기를 참조하십시오.
- 쇄골
-
이 옵션을 켜면 팔다리와 허브 사이의 추가 골격인 쇄골이 팔다리에 통합됩니다. 쇄골은 팔다리의 IK 체인 일부분이 아닙니다.
기본적으로 팔에서는 쇄골 옵션이 켜지고 다리에서는 꺼집니다.
- 손바닥/발목
-
이 옵션을 켜면 팔 끝에는 손바닥이 포함되고 다리에는 발목이 포함됩니다. 손바닥, 발목 및 손가락을 참조하십시오.
- 골격 수
-
팔다리의 골격 수입니다. 범위는 1에서 20 사이입니다.
- 업노드 사용
-
이 옵션을 켜면 소프트웨어에서 업노드를 IK 대상으로 사용합니다. 팔다리 축에는 교차형 점 도우미가 있습니다. 이는 이제 팔다리의 상향 벡터를 정의하며, 모션을 기본값보다 약간 더 제한합니다. 업노드는 관찰 제약 조건을 사용하여 "위쪽" 방향을 정의할 때 특히 유용합니다.