팔다리를 팔, 다리, 날개 등으로 사용할 수 있습니다. 팔과 다리는 같은 IK 시스템을 사용하며 사용자 인터페이스가 동일하다는 점에서 거의 비슷합니다.
-
허브 오브젝트 선택 또는 추가 >
 수정 패널 > 허브 설정 롤아웃 > 다리 추가/팔 추가
수정 패널 > 허브 설정 롤아웃 > 다리 추가/팔 추가
CAT에서 팔과 다리에는 두 가지 차이가 있습니다.
- 다리에는 CAT의 발 피벗 시스템을 포함하는 FootPlatform이 할당됩니다.
- 팔과 다리는 CATMotion에서 서로 다르게 처리됩니다.
팔다리는 최대 20개의 골격을 포함할 수 있으며, 각 골격은 최대 20개의 세그먼트로 구성될 수 있습니다. 모든 팔다리에는 쇄골이나 손바닥이 적절하게 포함될 수 있습니다.
임의의 구성에서 팔다리 골격을 설정할 수 있습니다. IK 설정에서는 설정 모드에서 골격을 회전하는 작업만 수행합니다.
골격 세그먼트는 해당 골격의 중심을 기준으로만 회전됩니다. 팔뚝 비틀기 등의 기능을 골격 세그먼트에 사용할 수 있습니다. 골격 비틀기 가중치 그래프를 사용하여 골격의 상대 회전을 제어합니다(팔다리 골격 편집 참조).
기본적으로 팔의 끝에 자동 배치되는 손바닥은 IK와 FK 간에 팔을 혼합하는 팔 컨트롤을 포함합니다. 또한 팔다리의 모든 회전 키를 지정하여 팔에 대해 IK 대상을 만들고, 손가락에 대한 마스터 컨트롤을 포함할 수도 있습니다.
CAT은 IK와 FK 간의 원활한 혼합을 지원합니다.
각 손바닥에는 손가락이 최대 100개 있을 수 있으며 각 손가락에는 골격이 최대 20개 있을 수 있습니다. 손가락은 FK 컨트롤로만 설정됩니다. 손가락 컨트롤에는 손가락 그룹 조작을 위해 가중치를 지정할 수 있는 손가락 포즈 관리자와 손가락 수정자가 포함됩니다.
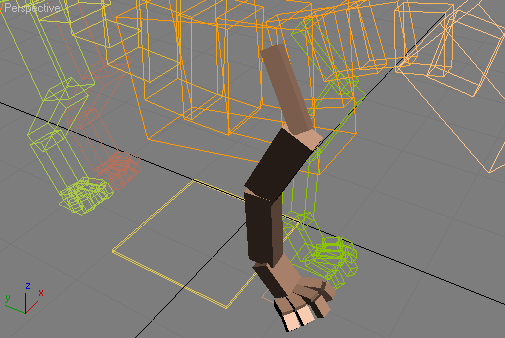
표범 리그의 앞다리
절차
팔다리를 추가하려면
-
 을 클릭하여 팔다리를 연결할 허브를 선택합니다.
을 클릭하여 팔다리를 연결할 허브를 선택합니다. - 추가할 팔다리 유형에 따라 다음 중 하나를 수행합니다.
- 팔을 추가하려면 다음 중 하나를 수행합니다.
- 수정 패널
 허브 설정 롤아웃에서 팔 추가를 클릭합니다.
허브 설정 롤아웃에서 팔 추가를 클릭합니다. - 뷰포트에서 허브를 마우스 오른쪽 버튼으로 클릭하고 도구 2 사분면에서 팔 추가를 선택합니다.
- 다리를 추가하려면 다음 중 하나를 수행합니다.
- 수정 패널 허브 설정 롤아웃에서 다리 추가를 클릭합니다.
- 뷰포트에서 허브를 마우스 오른쪽 버튼으로 클릭하고 도구 2 사분면에서 다리 추가를 선택합니다.
- 팔을 추가하려면 다음 중 하나를 수행합니다.