링크 제약 조건은 오브젝트에서 대상 오브젝트의 위치, 회전 및 배율을 상속하도록 합니다. 실제로 링크 제약 조건이 적용된 오브젝트가 애니메이션 전체에서 장면의 여러 오브젝트에 의해 제어될 수 있도록 계층 관계를 애니메이션할 수 있습니다.
링크 제약 조건으로 로보트의 팔을 활성화하여 공을 전달합니다.
예를 들어 링크 제약 조건을 사용하여 한 손에서 다른 손으로 공을 전달합니다. 프레임 0에서 공이 캐릭터의 오른손에 있다고 가정합니다. 손이 애니메이션되어 프레임 50에서 만나고 여기서 왼손으로 공이 전달된 다음, 프레임 100까지 다시 떨어집니다. 프레임 0에서 오른손을 대상으로 지정하고 프레임 50에서 대상을 왼손으로 변경하여 공에 링크 제약 조건을 할당하면 이 작업을 수행할 수 있습니다.
절차
예: 링크 제약 조건 할당 및 링크 애니메이션하기
-
 프레임 0으로 이동합니다.
프레임 0으로 이동합니다. - 상단 뷰포트에서 구형, 실린더 및 상자를 만듭니다.
-
 구를 선택합니다.
구를 선택합니다.  모션 패널을 엽니다.
모션 패널을 엽니다. - 제어기 할당 롤아웃을 확장합니다.
- 변환 선택: 위치/회전/배율 조정 제어기
 (제어기 할당)을 클릭합니다.
(제어기 할당)을 클릭합니다. - 링크 제약 조건을 선택합니다.
이렇게 하면 변환 항목이 변환: 링크 제약 조건으로 변경되고 링크 매개변수: 위치/회전/배율 조정이라는 하위 제어기가 추가됩니다. 이 제어기는 개별 변환 트랙의 직계 상위가 됩니다. 또한 링크 횟수: LinkTimeControl이라는 제어기 트랙이 추가됩니다.
LinkTimeControl 제어기는 링크 제약 조건 키를 트랙 바에 표시하여 트랙 바에서 조작할 수 있도록 하는 데 사용됩니다.
애니메이션 메뉴
 제약 조건 하위 메뉴에서 링크 제약 조건을 할당할 수도 있습니다.
제약 조건 하위 메뉴에서 링크 제약 조건을 할당할 수도 있습니다. 대상 오브젝트에 연결하기 전에 표준에 연결을 적용하는 것이 좋습니다. 이렇게 하면 대상 오브젝트에 대한 첫 번째 링크가 생성되기 전에 오브젝트 자체를 애니메이션할 수 있습니다.
- 링크 매개변수 롤아웃에서 표준에 연결을 클릭합니다.
그러면 링크 매개변수 롤아웃에 있는 링크 리스트의 프레임 0에 표준 항목이 추가됩니다.
- 시간 슬라이더를 프레임 1로 드래그합니다.
- 링크 추가를 클릭하고 원통을 선택합니다.
원통이 대상이 되고 링크 리스트에 추가됩니다. 이제 구와 원통 간에 링크 제약 조건 관계가 활성화됩니다.
- 링크 추가를 다시 클릭하여 끕니다.
- 시간 슬라이더를 프레임 50으로 드래그합니다.
 를 켜고 현재 위치에서 멀리 떨어진 위치로 원통을 이동합니다.
를 켜고 현재 위치에서 멀리 떨어진 위치로 원통을 이동합니다. -
 애니메이션을 실행합니다.
애니메이션을 실행합니다. 실린더가 움직이면 구형도 따라 움직입니다. 구형이 링크 제약 조건이 적용되었습니다.
- 구를 선택합니다.
- 시간 슬라이더를 프레임 25으로 드래그합니다.
- 모션 패널 링크 매개변수 롤아웃에서 링크 추가를 클릭하고 상자를 선택한 다음 링크 추가를 끕니다.
이제 프레임 25에서 활성화되는 다른 대상을 추가했습니다.
 를 끄고 애니메이션을 재생합니다. 구가 프레임 0부터 24까지 원통에 연결되어 상자에 연결되는 지점인 프레임 25까지 원통을 따라 이동합니다.
를 끄고 애니메이션을 재생합니다. 구가 프레임 0부터 24까지 원통에 연결되어 상자에 연결되는 지점인 프레임 25까지 원통을 따라 이동합니다. - 구를 선택한 상태에서 트랙 바의 키 중 하나를 마우스 오른쪽 버튼으로 클릭하고 키 삭제 하위 메뉴를 엽니다.
"Sphere01: 링크 횟수" 항목을 확인합니다. 이 키는 링크 횟수: LinkTimeControl 제어기에 의해 트랙 바에서 액세스할 수 있도록 만들어진 특수 키입니다. 이러한 키를 사용하면 일반적인 애니메이션 키처럼 타임라인에서 드래그하거나 삭제하여 트랙 바에서 직접 링크 애니메이션을 수정할 수 있습니다. 그러나 다른 애니메이션 키와는 달리 Shift 키를 누른 채 드래그하여 키를 복제할 수 없습니다.
모션 패널을 통해 링크 제약 조건의 매개변수에 액세스하려면
- 링크 제약 조건이 적용된 오브젝트를 선택합니다.
- 필요한 경우 모션 패널에서 링크 매개변수 롤아웃을 확장합니다.
인터페이스
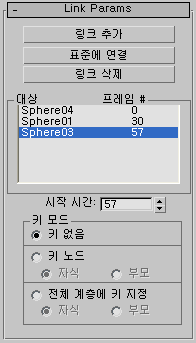
링크 제약 조건을 할당한 다음에는 모션 패널의 링크 매개변수 롤아웃에서 해당 특성에 액세스할 수 있습니다. 이 롤아웃에서는 대상을 추가하고 삭제하며 각 대상이 제약된 오브젝트의 활성 상위가 되는 시간을 애니메이션할 수 있습니다.
트랙 바와 트랙 뷰에서 키를 조작하여 링크 프레임의 애니메이션을 수정할 수도 있습니다. 그러나 이러한 컨텍스트의 표준 키 삭제 방법은 링크 키에 적용되지 않습니다. 대신 링크 매개변수 롤아웃의 링크 삭제 기능을 사용해야 합니다.
- 링크 추가
- 새 링크 대상을 추가합니다.
링크 추가를 클릭한 후 링크를 활성화할 프레임으로 시간 슬라이더를 설정한 다음 연결할 오브젝트를 선택합니다. 링크 추가가 설정되어 있는 한 링크 추가를 계속할 수 있습니다. 이 모드를 종료하려면 활성 뷰포트를 마우스 오른쪽 버튼으로 클릭하거나 링크 추가를 다시 클릭합니다.
- 표준에 연결
- 표준(전체 장면)에 오브젝트를 링크합니다.
표준이 리스트의 첫 번째 대상이 되는 것이 좋습니다. 이렇게 하면 리스트에서 다른 대상이 삭제되는 경우 오브젝트가 독립적 생성이나 애니메이션 변형으로 되돌아가는 것을 방지할 수 있습니다.
- 링크 삭제
- 강조 표시된 링크 대상을 제거합니다. 링크 대상이 제거되면 제약된 오브젝트에 더 이상 영향을 주지 않습니다.
- [대상 리스트]
- 링크 대상 오브젝트를 표시합니다.
- 시작 시간
- 대상의 프레임 값을 할당하거나 편집합니다.
리스트에서 대상을 강조 표시하면 시작 시간에 오브젝트가 상위가 되는 프레임이 표시됩니다. 링크 전송이 수행되는 시기를 변경하려면 값을 조정합니다.
팁: 트랙 바와 트랙 뷰에서 키를 조작하여 링크 프레임의 애니메이션을 수정할 수도 있습니다.
키 모드 그룹
- 키 없음선택하면 제약을 받는 오브젝트나 그 대상에 키프레임이 기록되지 않습니다. 키를 삽입하지 않아도 링크 컨트롤이 발생합니다.
- 키 노드선택하면 지정된 옵션에 키프레임이 기록됩니다. 하위 및 상위의 두 가지 옵션이 있습니다. 하위는 제약을 받는 오브젝트에만 키프레임을 설정합니다. 상위는 제약된 오브젝트와 모든 대상에 키프레임을 설정합니다.
- 전체 계층에 키 지정지정된 옵션에 대한 계층을 따라 키프레임을 설정합니다. 하위 및 상위의 두 가지 옵션이 있습니다. 하위는 제한된 오브젝트와 그 상위에만 키프레임을 설정합니다. 상위는 제한된 오브젝트, 그 대상 및 상위 계층에 키프레임을 설정합니다.