CATMotion também integra o sistema de redirecionamento CATRedirecionamento que tem duas vantagens sobre a cinemática inversa padrão: o redirecionamento elimina o problema de redimensionamento de quebrar na articulação do joelho causada pela extensão excessiva da cadeia de cinemática inversa e como a perna empurra a pelve para cima, o personagem tem "peso" automaticamente.
Como o redirecionamento permite pernas completamente retas, você pode usá-lo para alcançar andares que seriam difíceis ou impossíveis usando a cinemática inversa.
em CATMotion, o redirecionamento é controlado por uma combinação de dois controladores: do MotionBuilder é controlada por uma combinação de dois controladores: KneeAngle e LegWeight.
KneeAngle
O ciclo de andamento é divido em quatro ângulos de joelho. O controle sob o ângulos de joelho é acessado no controlador KneeAngle, sob Pernas no editor CATMotion.
Para maior clareza, chamamos os quatro ângulos de joelho Elevação, Meia elevação, Planta e Meia planta.
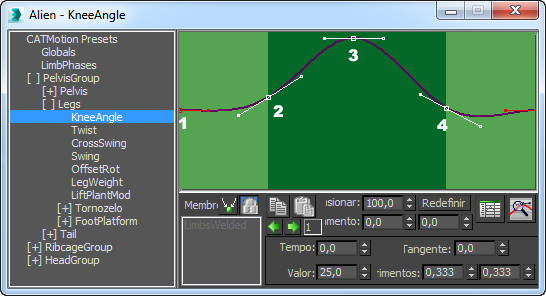
1. Meia planta
2. Elevação
3. Meia elevação
4. Planta
- Meia planta
-
O ângulo do joelho entre Planta e Elevação.
- Elevação
-
O ângulo do joelho no momento em que o pé está prestes a sair do solo.
- Meia elevação
-
O ângulo do joelho no meio de seu caminho no ar.
- Fixo
-
O ângulo do joelho no momento em que o pé é colocado de volta no solo.
LegWeight
O outro controlador importante para redirecionar é denominado LegWeight. Pode ser encontrado com KneeAngle sob Pernas no editor CATMotion.
O gráfico LegWeight controla o quanto a plataforma do pé está sendo puxada para baixo para o plataforma está sendo puxados para baixo para o plano de chão. Quando LegWeight tem um valor de 0, aumentar o ângulo do joelho irá puxar o pé ainda mais para o ar. Quando LegWeight tem um valor de 1,0, aumentar o ângulo do joelho irá puxar a pelve para baixo.
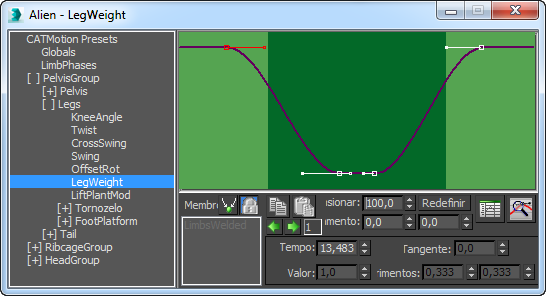
LegWeight também podem ser considerado como Prioridade da perna. O lado esquerdo do gráfico é a Prioridade de elevação e o lado direito é a Prioridade da planta. Isso se torna importante quando você tenta puxar os ângulos mais do que é possível alcançar fisicamente. A seguir, ajustando os pesos da perna para que uma esteja definida e outra para zero, você pode controlar onde o erro será maior. Normalmente, a perna de apoio deve ser a prioridade.
O erro dentro do sistema é absorvido nos tornozelos. Se você observar que os tornozelos tendem a ir diretamente para cima ou, caso contrário, se comportam de maneira estranha, tente ajustar o LegWeight ou KneeAngle.
Normalmente, a primeira coisa a tentar é reduzir o Comprimento de passo máximo ou aumentar ou diminuir os vários ângulos do joelho.
Se o movimento parece um pouco desajeitado, pode ser que o gráfico LegWeight necessita de suavização. Se os tornozelos forem demasiado retos quando o pé eleva, pode ser que LegWeight na parte de elevação do gráfico seja demasiado longa.
Correr e redirecionar
Apesar do redimensionamento ser útil para andar, não é uma solução ideal para correr. Neste ponto, é praticamente impossível obter uma mesclagem útil entre onde os pesos da perna soltam e o "ar" assume.
Por agora, recomendamos que você use a cinemática inversa para correr e saltar.