Podczas tworzenia ścieżki przejścia program Revit analizuje bieżący widok i oblicza optymalną (najkrótszą) ścieżkę. Podczas obliczeń ścieżka przejścia jest prowadzona z unikaniem kategorii zidentyfikowanych jako przeszkody (zdefiniowanych w ustawieniach). Jest też uwzględniana typowa szerokość ciała osoby i ruchy ciała podczas chodzenia.
Analiza ścieżki przejścia jest oparta na aparacie analizy Simulex. Jest realizowana w czterech krokach:
- Zdefiniowanie siatki i wygenerowanie trasy wstępnej.
- Znalezienie najbliższej przeszkody wzdłuż trasy wstępnej.
- Wygenerowanie ścieżki zmodyfikowanej za pomocą punktów przyciągania do narożników.
- Dodanie odsunięcia od przeszkód w celu wygenerowania optymalnej „ścieżki spaceru”.

Te kroki stanowią procesy wewnętrzne analizy. W poniższych sekcjach opisano te kroki w celu objaśnienia sposobu generowania linii ścieżki.
Generowanie trasy
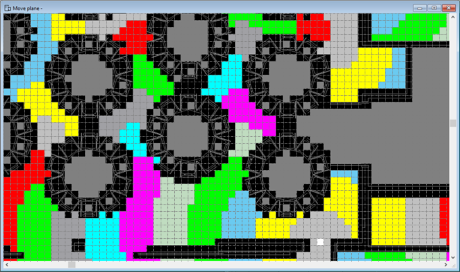
W celu rozpoczęcia analizy ścieżki przejścia program Revit stosuje do rzutu siatkę. Rozdzielczość siatki jest stałą i wynosi 0,2 m. Każdej komórce siatki przypisana zostaje wartość odzwierciedlająca odległość od punktu końcowego ścieżki. Kolory na obrazie wskazują zakresy odległości.
Komórki zawierające kategorie zdefiniowane jako przeszkody są usuwane z listy rozważanych komórek (są oznaczone na obrazie kolorem czarnym). Jeśli komórka styka się na dwóch bokach z takimi usuniętymi komórkami, wówczas ona też zostaje usunięta. Na poniższym obrazie przedstawiono taką sytuację między kilkoma stołami. Taki stan może mieć wpływ na analizę, gdy przestrzenie są bardzo wąskie.
| Siatki i odległości |
|
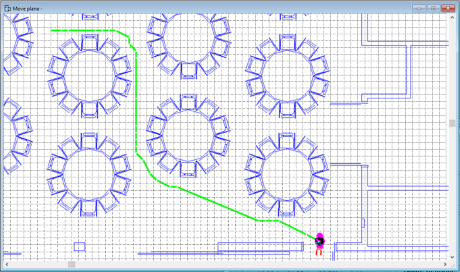
Na podstawie tych obliczeń wstępnych program Revit generuje ścieżkę początkową, tworząc węzły w punktach środkowych komórek wzdłuż najkrótszej ścieżki. Najkrótsza ścieżka pozbawiona przeszkód jest określana przy użyciu niestandardowej formy algorytmu A*.
| Ścieżka początkowa |
|
Identyfikowanie przeszkód w pobliżu trasy wstępnej
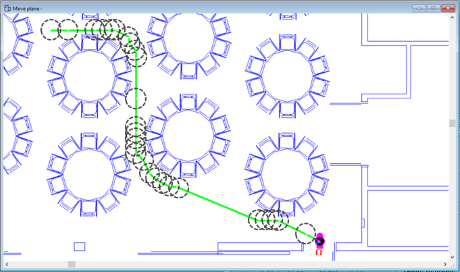
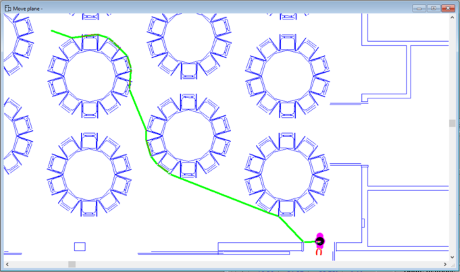
Aby wygenerować bardziej optymalną ścieżkę, program Revit identyfikuje przeszkody w pobliżu ścieżki początkowej. W celu znalezienia znajdujących się w pobliżu przeszkód w każdym węźle wzdłuż ścieżki początkowej umieszczany jest okrąg o promieniu 0,03 m. Najbliższy punkt przecięcia przeszkody z okręgiem jest identyfikowany jako punkt przyciągania do narożnika dla ścieżki zmodyfikowanej.
| Lokalizowanie przeszkód znajdujących się w pobliżu |
|
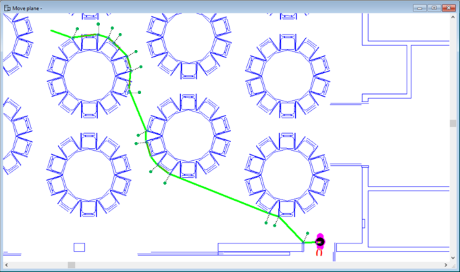
W celu wychwycenia dodatkowych punktów przyciągania do narożników program Revit stosuje kolejne przejście wzdłuż ścieżki początkowej. W przypadku węzłów, których okręgi o promieniu 0,3 m nie przecinały się z przeszkodami, stosowane są większe okręgi, o promieniu 0,566 m, w celu znalezienia potencjalnych bardziej oddalonych przeszkód.
| Lokalizowanie przeszkód znajdujących się w pobliżu w ramach drugiego przejścia |
|
Generowanie ścieżki zmodyfikowanej
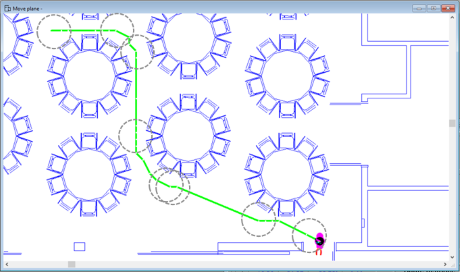
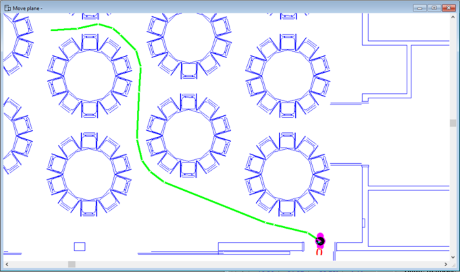
Na podstawie tych punktów przyciągania do narożników program Revit generuje ścieżkę zmodyfikowaną przebiegającą jak najbliżej przeszkód wzdłuż ścieżki początkowej. Na podstawie tej ścieżki zmodyfikowanej zostanie wygenerowana ostateczna ścieżka przejścia.
| Ścieżka zmodyfikowana |
|
Dodawanie odsunięcia w celu wyznaczenia optymalnej ścieżki przejścia
Program Revit odsuwa poszczególne węzły na ścieżce zmodyfikowanej o 0,3 m od przeszkód (0,25 m w celu uwzględnienia promienia ciała i 0,05 m w celu zapewnienia swobody ruchu). W odsunięciu stosowane jest odchylenie o kąt 90° od linii między punktem wejścia/wyjścia a węzłem, a kąt między punktami odsunięć wynosi co najmniej 30°.
| Odsunięcie uwzględniające szerokość ciała |
|
Punkty odsunięć, które są bardzo blisko siebie (mniej niż 0,2 m) są scalane, aby wygładzić ostateczną ścieżkę. Program Revit rysuje ostateczną zoptymalizowaną ścieżkę na podstawie punktów odsunięć.
| Tworzenie ostatecznej ścieżki przejścia |
|