O atributo Dist. máx. de rampa aplica-se a rampa linear ou helicoidal.
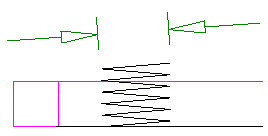
Para rampa linear é a distância para cada movimento linear:
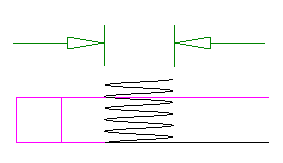
Para rampa helicoidal, é o diâmetro da hélice:
Se este atributo não for definido, então Dist. máx. de rampa é inicializado para o diâmetro da ferramenta. Se uma rampa nessa distância causa uma invasão, então a distância é reduzida por uma porcentagem da configuração inicial. Várias porcentagens diferentes são testadas pelo FeatureCAM.
Se uma posição de rampa livre de invasão não puder ser encontrada, então o FeatureCAM acessa a profundidade em rampa utilizando movimentos helicoidais que seguem a forma do percurso. Para que isso funcione, sua máquina precisa ser capaz de executar interpolação helicoidal.
Se, após reduzir a distância de rampa, uma posição para rampa ainda não puder ser encontrada, um mergulho direto pode ocorrer. Se você observar mergulhos diretos, pode configurar Dist. máx. de rampa para um valor menor que o padrão. Por exemplo, se a sua ferramenta apresentar um diâmetro de 6 mm, o padrão de Dist. máx. de rampa é inicialmente 6 mm. Se você observar mergulhos diretos em 6mm, tente configurar Dist. máx. de rampa como 3 mm. Se uma posição de rampa livre de invasão não puder ser encontrada, a Dist. máx. de rampa é reduzida utilizando as mesmas porcentagens que antes, mas com um valor inicial de 3 mm em vez de 6 mm. Dessa forma, você terá uma chance maior de obter uma rampa para profundidade com sucesso. A desvantagem é que, configurando Dist. máx. de rampa como 3 mm, todas as rampas para profundidade utilizam essa distância menor.