當您建立步行路徑時,Revit 會分析目前的視圖,並計算最佳化 (最短) 的路徑。計算時,步行路徑會避開識別為障礙物 (在設定中定義) 的品類,並計入一般人的寬度和走路時的身體擺動。
步行路徑分析是根據 Simulex 分析引擎。此引擎會執行四個步驟:
- 定義網格,並產生一條初步路線。
- 沿著初步路線尋找最近的障礙物。
- 使用轉角鎖點產生一條修改過的路徑。
- 與障礙物產生偏移,以產生一條最佳的「步行」路徑。

這些步驟是分析的內部程序。以下幾節說明這些步驟,以清楚瞭解如何產生路徑線。
產生路線
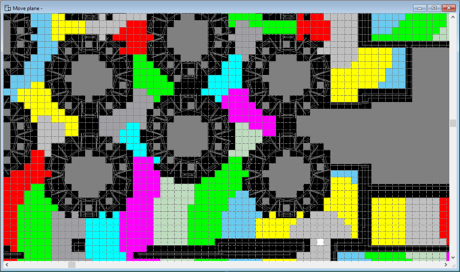
Revit 會先將網格套用到平面視圖,以開始進行步行路徑分析。網格解析度固定為 0.2 公尺。每個網格儲存格會指定一個與路徑終點的距離的相關值。影像中的顏色表示距離範圍。
包含定義為障礙物的品類的儲存格,會從考量中移除 (在影像中顯示為黑色)。如果某個儲存格有兩邊被這些移除的儲存格包圍,也會從考量中移除該儲存格。下列影像顯示一些桌子之間的這個狀況。這個狀況在空間非常窄的時候可能會影響分析。
| 網格和距離 |
|
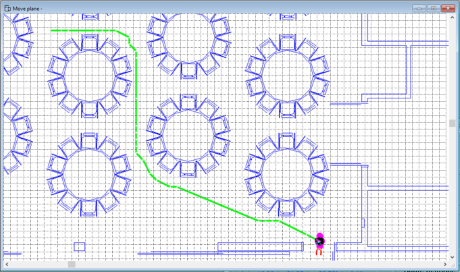
Revit 會根據這些初期計算,產生初步的路徑,沿著最短的可能路徑透過儲存格的中心點建立節點。最短的無障礙路徑是使用 A* 演算法的自訂形式決定。
| 初步路徑 |
|
識別初步路線附近的障礙物
為了產生一條比較好的路徑,Revit 會識別初步路徑附近的障礙物。為了找出附近的障礙物,程式會沿著初步路徑在每個節點處放置一個半徑為 0.3 公尺的圓。障礙物與圓最近的交點會識別為一個轉角鎖點供修改的路徑之用。
| 找出附近的障礙物 |
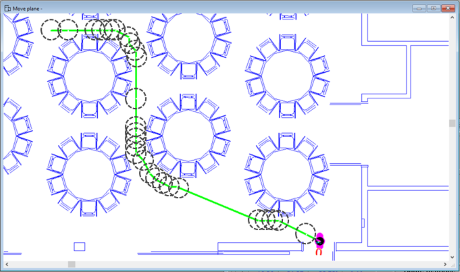
|
為了擷取其他轉角鎖點,Revit 會沿著初步路徑再通過一次。在半徑為 0.3 公尺的圓與障礙物未相交的任何節點處,則會使用一個更大、半徑為 0.566 公尺的圓,尋找距離可能遠一點的障礙物。
| 找出第二次通過時的附近障礙物 |
|
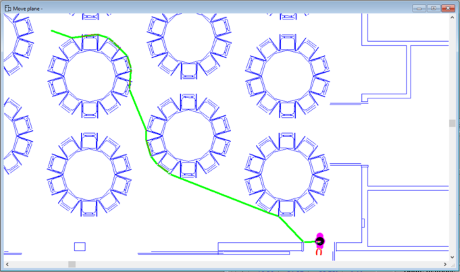
產生一條修改過的路徑
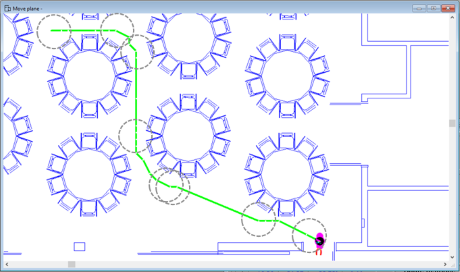
Revit 會使用這些轉角鎖點,沿著初步路徑,跟著一條盡可能接近障礙物的路線,產生一條修改過的路徑。這條修改過的路徑會變成產生最終步行路徑的基礎。
| 修改過的路徑 |
|
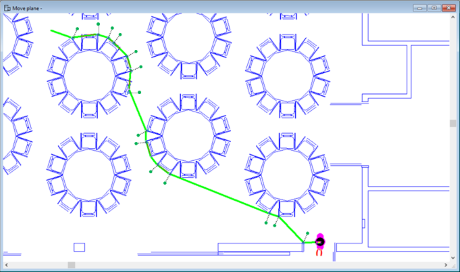
偏移最佳步行路徑
Revit 會將修改過路徑上的每個節點偏離障礙物 0.3 公尺 (0.25 公尺是給身體半徑,0.05 公尺是給身體擺動)。此偏移是以從入口/出口到節點形成 90° 角的方向偏移,偏移點之間則最少有 30°。
| 用於身體寬度的偏移 |
|
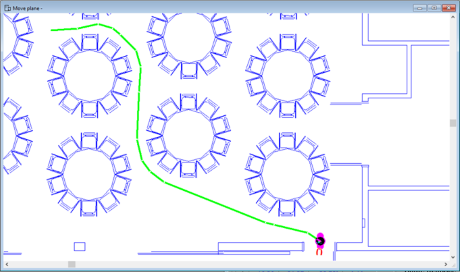
非常接近 (小於 0.2 公尺) 的偏移點會合併在一起,讓最終的路徑變得比較平滑。Revit 使用偏移點繪製最佳化的最終路徑。
| 建立最終步行路徑 |
|