Quando você cria um caminho de deslocamento, o Revit analisa a vista atual e calcula um caminho ideal (mais curto). Durante os cálculos, o caminho de deslocamento evita as categorias identificadas como obstáculos (definidas nas configurações) e considera a largura de uma pessoa típica e seu deslocamento enquanto caminha.
A análise do caminho de deslocamento é baseada no mecanismo de análise Simulex. Ela é executada em 4 etapas:
- Definir uma grade e gerar uma rota preliminar.
- Localizar os obstáculos mais próximos ao longo da rota preliminar.
- Usar pontos de snap de canto para gerar um caminho modificado.
- Desviar dos obstáculos para gerar um caminho ideal para “caminhar”.

Essas etapas são processos internos da análise. As seções a seguir descrevem as etapas para esclarecer o modo como a linha do caminho é gerada.
Gerar uma rota
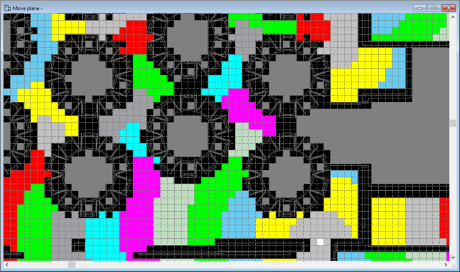
Para começar a análise de um caminho de deslocamento, o Revit aplica uma grade à vista de planta. A resolução da grade é fixada em 0,2 m. Cada célula da grade recebe um valor relacionado com a distância desde o ponto final do caminho. A cores na imagem indicam os intervalos de distância.
As células contendo categorias definidas como obstáculos são removidas da consideração (mostradas em preto na imagem). Se uma célula estiver rodeada nos dois lados pelas células removidas, essa célula também será removida da consideração. A imagem a seguir mostra essa condição entre algumas mesas. A condição poderá afetar uma análise quando os espaços forem muito estreitos.
| Grades e distâncias |
|
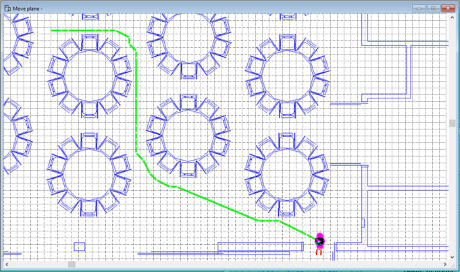
Com base nesses cálculos iniciais, o Revit gera um caminho preliminar, criando nós através dos pontos centrais das células ao longo do caminho mais curto possível. O caminho desobstruído mais curto é determinado usando uma forma personalizada do Algoritmo A*.
| Caminho preliminar |
|
Identificar obstáculos perto da rota preliminar
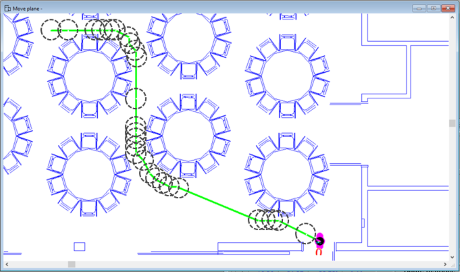
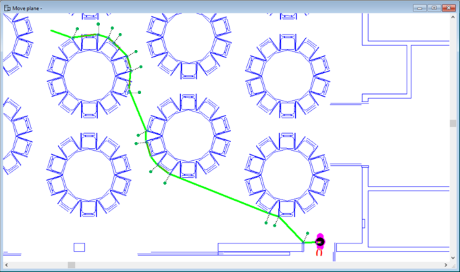
Para gerar um caminho melhor, o Revit identifica obstáculos perto do caminho preliminar. Para encontrar obstáculos nas proximidades, um círculo com raio de 0,03 m é colocado em cada nó ao longo do caminho preliminar. A interseção mais próxima de um obstáculo com o círculo é identificada como um ponto de snap de canto do caminho modificado.
| Localizar obstáculos nas proximidades |
|
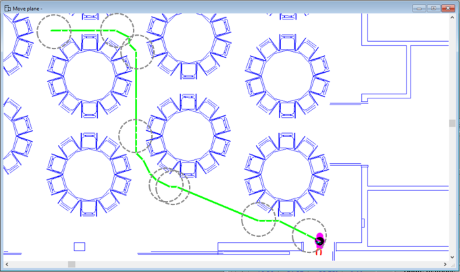
Para capturar pontos de snap de canto adicionais, o Revit realiza outra passagem ao longo do caminho preliminar. Nos nós em que os círculos com raio de 0,03 m não fazem interseção com os obstáculos, um círculo com raio maior de 0,566 m é usado para encontrar possíveis obstáculos mais longe.
| Localizar obstáculos nas proximidades na 2ª passagem |
|
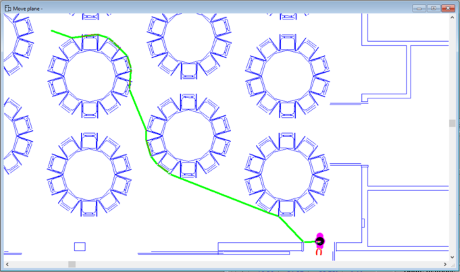
Gerar um caminho modificado
Usando esses pontos de snap de canto, o Revit gera um caminho modificado que segue a rota mais próxima possível dos obstáculos ao longo do caminho preliminar. Esse caminho modificado é a base para gerar o caminho de deslocamento final.
| Caminho modificado |
|
Deslocar o caminho de deslocamento ideal
O Revit desloca cada nó no caminho modificado em 0,3 m de distância do obstáculo (0,25 m para o raio do corpo e 0,05 m para a oscilação do corpo). O deslocamento projeta 90° desde os ângulos de entrada/saída até o nó, com um mínimo de 30° entre os pontos de deslocamento.
| Deslocamento para largura do corpo |
|
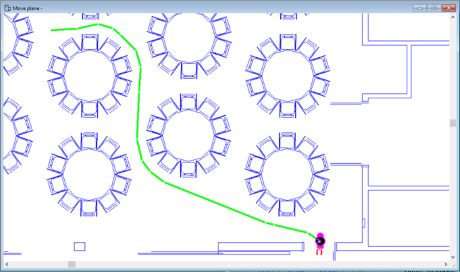
Os pontos de deslocamento que estão muito próximos entre si (menos de 0,2 m) são mesclados para suavizar o caminho final. O Revit desenha o caminho otimizado final usando os pontos de deslocamento.
| Criar caminho de deslocamento final |
|