HI(历史独立)解算器在时间上不依赖于上一个关键帧计算得到的 IK 解决方案,因此无论在第 2000 帧处还是在第 20 帧处使用 HI 解算器,其速度都一样快。
“HI 解算器”使用目标来设置链动画。设置目标动画,IK 解算器移动末端效应器(链中最后一个关节的轴点)来匹配目标的位置。通常,目标是其他控制对象(例如点或虚拟对象、脊椎或骨骼)的父对象,而这些控制对象与视口或卷展栏滑块相关联。
IK 解决方案在解算器平面 中发生。解算器平面在世界空间中的角度受一个名为旋转角度的参数控制。旋转角度可以设置动画。可以直接对它进行调整,也可以使用操纵器来调整。
“HI 解算器”允许创建多个链或重叠链。这允许为其他控件创建多个目标。将目标链接到点、脊椎、骨骼或虚拟对象后,可以创建简单的控制来实现复杂链或层次的动画。也可以在这些目标上使用限制或控制对象,以及其他动画工具。
应用“HI 解算器”
要将“HI 解算器”应用到层次中的任意部分,请选择要开始使用解算器的骨骼或对象。然后选择“动画”菜单  “IK 解算器”“HI 解算器”。在活动视口中,将光标移到要结束链的骨骼上。单击选择此骨骼后,便将目标放到了这个骨骼的轴点上。如果希望目标位于骨骼的远端,细化要放置目标的骨骼。会添加额外的骨骼,然后选择该骨骼将目标放在末端。
“IK 解算器”“HI 解算器”。在活动视口中,将光标移到要结束链的骨骼上。单击选择此骨骼后,便将目标放到了这个骨骼的轴点上。如果希望目标位于骨骼的远端,细化要放置目标的骨骼。会添加额外的骨骼,然后选择该骨骼将目标放在末端。
创建骨骼时,在链的末端自动创建一个很小的“凸起”骨骼以辅助完成此过程。
设置多个链
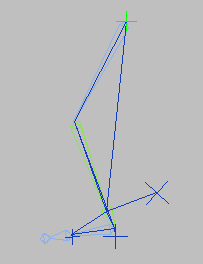
要为人类的腿部装备骨骼,可以在一条腿中使用如下三条链:
- 第一条链从臀部到脚踝处。此链控制腿部的整体运动包括膝部弯曲。
- 第二条链从脚踝到拇指球。此链控制脚跟的上下移动。
- 第三条链从拇指球到脚趾。
三条链一起协调工作,保持脚部在空间中的位置。这意味着当角色的身体移动时,将保持脚部踩踏在地面上。这三条 IK 链在臀部至脚趾的设置中在脚的关键点位置放置目标,以此模拟自然的脚部动作。现实生活中,脚趾、拇指球和脚跟既可以踩踏地面又可以从地面上抬起。
每条链上都有用于驱动脚跟、拇指球和脚趾运动的目标。使用 IK 目标来抬起脚跟、弯曲脚趾、移动或旋转整个足部,并保持脚的空间位置。
重叠链
IK 解算器系统允许在单个层次中创建重叠 IK 链。例如,在人类的腿部中,可以创建一条由臀部到脚踝的链,接着创建从膝部到拇指球的第二条链,再创建从脚踝到脚趾的第三条链。希望将目标应用到后续的骨骼中,但却不想细化骨骼时,可以使用重叠链。
重叠 HI IK 链的另一个用途是可以保持层次底部的目标稳固地位于根位置。在腿部的例子当中,脚踝、拇指球和脚趾将不发生移动,直到层次上部已经达到拉伸的最大限度。
重叠链使脚趾一直贴在地面上
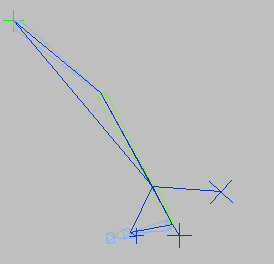
重叠链使脚趾一直贴在地面上
不要使用不同种类的 IK 解算器来设置重叠链,否则将会得到不可预测的结果。
创建控制对象
要创建控制对象来设置目标动画,先在目标附近创建虚拟对象、点、样条线或其他对象,然后将目标链接到控制对象。例如在人类的腿部中,可以在脚踝、拇指球和脚趾处放置目标。然后在脚下创建三条样条线,一条用于脚跟、一条用于拇指球,另一条用于脚趾。将每个目标链接到每条样条线,然后便可以使用这些样条线来设置目标动画。也可以将样条线链接在一起,以便脚趾的转动由脚跟的移动控制。
除了层次链接之外,现在还可以结合 IK 解算器使用新的“约束”系统。可以应用任何约束来创建目标或骨骼与其他对象之间的关系。目标的位置可以约束在移动的虚拟对象上。或者可以在相同的位置创建三条骨骼链,将一条骨骼链约束到其他骨骼链,然后为这些约束加权。
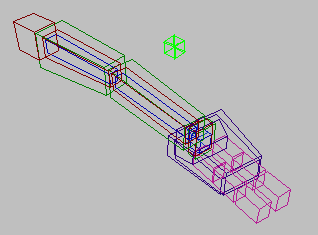
骨骼链约束到一起
使用控制对象在视口中提供了更强大的选择工具。可以使用控制对象来分离链,例如在人的手臂中,一条链可能在腕部结束,并为手和手指创建一条单独的链。腕部的控制对象用作手部链的根节点,但手部链从层次上讲是与手臂链断开的。
可以使用操纵器辅助对象创建视口滑块,然后使用视口滑块操纵控制对象的变换。使用连线参数将滑块和控制对象关联。也可以创建“自定义属性”将这些滑块添加到“对象”卷展栏中。
混合使用“正向运动学”和“反向运动学”
HI IK 解算器提供了在单个动画轨迹中混合 FK 和 IK 的工具。在 IK 控制器下面有一个由该解算器指定的 FK 子控制器。
激活“启用”按钮后,FK 控制器的值得到保留但是被忽略。禁用“启用”选项后,应用 FK 子控制器的值。要访问“启用”按钮,选择目标并转到“运动”面板,然后禁用“启用”按钮。这将允许使用骨骼或层次对象的 FK 旋转来创建动画。
“IK 设置 FK 姿势”允许在 FK 的操作过程中启用 IK。禁用“启用”按钮并启用“IK 设置 FK 姿势”后,选择和移动目标时将允许使用 IK 创建正向运动学关键帧。启用“自动关键点”后,移动目标调整骨骼姿势并为链中的所有对象添加旋转关键点。
同时使用 IK 和 FK 时,可能会创建目标离开链末端的情况。使用“IK/FK 捕捉”按钮重新放置目标,将目标捕捉回链的末端。启用“自动捕捉”选项后,捕捉自动进行;接触目标时,不需单击 IK/FK 捕捉按钮。
控制 HI IK 精度
使用“HI 解算器”设置动画时,如果发现肢体动画不平滑,应当尝试将“HI 解算器属性”卷展栏中“解决方案”组中的“迭代次数”加倍。也可以试着降低“阈值”来平滑动画。