Definition タブを使用してキャラクタのスケルトン ボーンを HIK ソルバによって理解されるノードにマッピングする前に、HIK にキャラクタのスケルトンやジョイントの変換の比率に関する重要な情報を提供する基本的な T-スタンスでキャラクタをセットアップする必要があります。
インバース キネマティクスとリターゲッティング ソルバがキャラクタに対して正確な結果を生成できるようにするには、キャラクタの T-スタンスが以下に示す説明および例に可能な限り一致している必要があります。T-スタンスが正しく設定されていない場合、ソルバはすべての操作を誤ったデータに基づいて行い、歪んだポーズ、ぎこちないポーズ、または予期せぬポーズを生成する可能性があります。
T-スタンスの要件は次のとおりです。
- キャラクタは Z 軸の正の方向を向いている必要があります。
- 腕は X 軸に沿って広げられている必要があります。したがって左腕が X 軸の正の方向を向いている必要があります。
- キャラクタの頭の上部は、Y 軸の正の方向を向いている必要があります。
- キャラクタの手は、開いた状態で、手のひらが地面を向き、親指が X 軸と平行になっている必要があります。
- キャラクタの足は、脚に対して直角(図に示すように、つま先が Z 軸に沿っている)であるか、脚の向きに沿って連続している(つま先が真下を向いている)ようにします。足は、Y 軸を中心に回転させないようにします(つまり、左足のつま先が内向きになって右脚側を向いていたり、外向きになって右脚の反対側を向いていたりしないようにします)。
典型的な T-スタンスを次の図に示します。 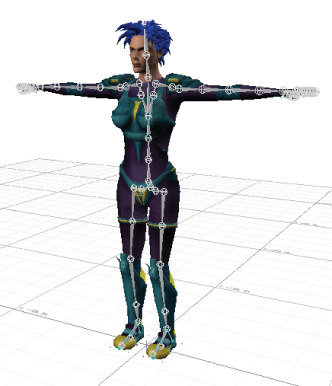
注: HIK に必要な特定のボーン構造の詳細については、「HIK キャラクタ構造」を参照してください。
四足歩行
HIK を使用すると、二足歩行だけでなく、四足歩行も制御できます。quadruped (四足歩行)のキャラクタのキャラクタライズを作成する場合は、キャラクタの前後の手足、すべての指と足指が床に対して完全に伸ばされているスタンスでスケルトンを設定する必要があります。詳細は、「スタンス」を参照してください。