Click the Point-Cloud tab > Edit panel > Filter to reduce the point density of the selected point-cloud.
Note: The Filter option is available only when creating inspections for CNC and Manual machines.
To filter a point-cloud:
- In the inspection sequence, select the Point-Cloud item.
- Project the point-cloud.
- Click Point-Cloud tab > Edit panel > Filter. The
Filter Point-Cloud
dialog is displayed.
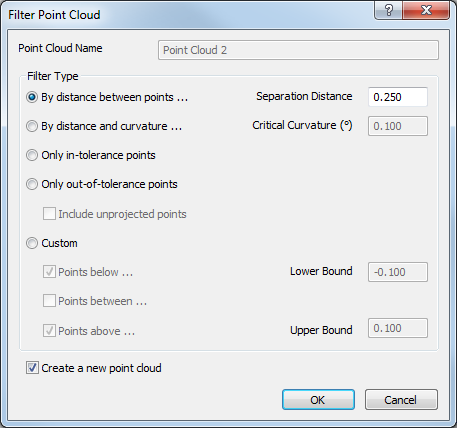
- Choose a
Filter Type to specify the density reduction method. Select:
- By distance between points to filter the points by distance. PowerInspect deletes all points within the specified Separation distance between points for each successive point in the point-cloud. Increase the minimum distance value to reduce point density.
- By distance and curvature to filter the points by curvature, and then by distance. For each successive point in the point-cloud, PowerInspect deletes all points within the specified Separation distance if the angle to any point exceeds the specified Critical curvature. Increase the minimum angle and minimum distance values to reduce point density. Point-clouds filtered using this option are slower to display than those filtered using a different option.
- Only in-tolerance points to display points that are within tolerance.
- Only out-of-tolerance points to display points that are out-of-tolerance. Select the Include unprojected points check box to also display those points that have not been projected onto the CAD model.
- Custom to specify the lower and upper tolerance limits for the points to be displayed. Select Points below to display points below the specified Lower bound; select Points above to display points above the specified Upper bound; select Points between to display points between the Lower bound and Upper bound limits.
- To preserve the original point-cloud and save the filtered point-cloud as a new item, select the Create a new point-cloud check box.
- Click OK to filter the point-cloud. When the process is complete, the filter type and number of points remaining are included in the name of the resulting point-cloud.
Tip: You can also specify the point density when
creating a point-cloud on the fly.