サーフェス到着動作は、1 つまたは複数のオブジェクトを代理オブジェクトの静止または可動ターゲットとする点で探査動作と似ています。ただし、探査動作と異なり、ターゲットに到着した代理オブジェクトは、すると停止します。また、代理オブジェクトがターゲット オブジェクト上で停止する場所と停止前に接近する方法を、ある程度指定することもできます。
-
 [作成](Create)パネル >
[作成](Create)パネル >  ([ヘルパー](Helpers)) > [オブジェクト タイプ](Object Type)ロールアウト > [群集](Crowd) > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > [新規作成](New)ボタンをクリック > [動作タイプを選択](Select Behavior Type)ダイアログ ボックス > [サーフェス到着動作](Surface Arrive Behavior)
([ヘルパー](Helpers)) > [オブジェクト タイプ](Object Type)ロールアウト > [群集](Crowd) > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > [新規作成](New)ボタンをクリック > [動作タイプを選択](Select Behavior Type)ダイアログ ボックス > [サーフェス到着動作](Surface Arrive Behavior)
-
群集オブジェクトを選択 >
 [修正](Modify)パネル > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > [新規作成](New)ボタンをクリック > [動作タイプを選択](Select Behavior Type)ダイアログ ボックス > [サーフェス到着動作](Surface Arrive Behavior)
[修正](Modify)パネル > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > [新規作成](New)ボタンをクリック > [動作タイプを選択](Select Behavior Type)ダイアログ ボックス > [サーフェス到着動作](Surface Arrive Behavior)
-
群集オブジェクトを選択 > [修正](Modify)パネル > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > ドロップダウン リストから[サーフェス到着動作](Surface Arrive)を選択
この動作の使用例としては、鳥が電柱の列の上空を飛び、その後別の電柱の先端に着地する様子があります。
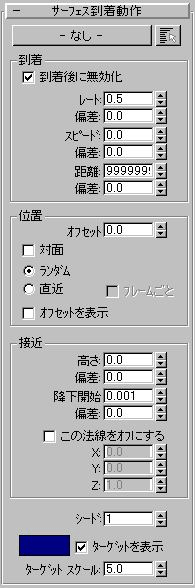
インタフェース
- [ターゲット](target)ボタン
- 単一のターゲットを指定します。このボタンをクリックして、ビューポート内のターゲット オブジェクトをクリックします。ターゲットの名前がボタン上に表示されます。ターゲットの選択前は、[なし](None)という語がボタン上に表示されています。
[複数選択](Multiple Selection)(次の項目を参照)を使用して複数のターゲットを選択した場合は、[複数](Multiple)という語がボタン上に表示されます。 ターゲットとして指定されたオブジェクトを参照するには、[複数選択](Multiple Selection)ボタンをクリックします。
 複数選択
複数選択- [選択](Select)ダイアログ ボックスが開き、複数のターゲットを選択できます。
複数のターゲットがある場合は、代理オブジェクトを設定して、グループの中で一番近いターゲットに向かって移動させたり、ターゲットの位置の計算された平均値に移動させたりできます。
[到着](Arrival)領域
サーフェス到着動作の 3 つの要素、レート、スピード、距離を指定します。
- 到着後に無効化
- このチェック ボックスにチェックマークが付いている場合、代理オブジェクトがサーフェスに到着すると、サーフェス到着動作がオフになります。既定値ではチェックマークが付いています。
- レート
- 代理オブジェクトの加速を指定する代理オブジェクトの[最大加速](Max Accel)設定の倍数です。1.0 という値は、代理オブジェクトの最大加速度を使用するという意味です。既定値は 0.5 です。
- 偏差
- [レート](Rate)の設定に対し、ランダムな変化を追加します。
実際の偏差は、-1 から 1 の間のランダムな数字を[偏差](Deviation)の設定に乗算することにより計算され、その結果を[レート](Rate)の設定に乗算します。既定値は 0.0 です。
- スピード
- 到着する際の、ターゲットのスピードとの相対的なスピードです。既定値は 0.0 です。
- 偏差
- [スピード](Speed)の設定に対し、ランダムな変化を追加します。既定値は 0.0 です。
実際の偏差は、-1 から 1 の間のランダムな数字を[偏差](Deviation)の設定に乗算することにより計算され、その結果を[スピード](Speed)の設定に乗算します。
- 距離
- 動作が有効になる範囲を示す、ターゲットからの放射状の最大距離です。既定値は 9999999.0 です。
代理オブジェクトがこの半径内に入るまで、動作は無効です。
- 偏差
- [距離](Distance)の設定に対し、ランダムな変化を追加します。
実際の偏差は、-1 から 1 の間のランダムな数字を[偏差](Deviation)の設定に掛けることにより計算され、その結果を[距離](Distance)の設定に乗算します。既定値は 0.0 です。
[場所](Location)領域
- オフセット
- 代理オブジェクトが使用するために、サーフェスの法線に基づいて、計算された到着ポイントからの一定距離を指定します。既定値は 0.0 です。
- 対面
- このチェック ボックスにチェックマークが付いている場合、代理オブジェクトは、サーフェスの向かい合う三角形の頂点にのみ到着を試みます。既定値ではチェックマークが付いていません。
- ランダム(既定値) character studio により、到着点としてターゲット サーフェスに対してランダムな点が選択されます。
[ランダム](Random)オプションを使用すると、character studio によりシミュレーションの開始に 1 度だけ代理オブジェクトの到着点が選択されます。
- 直近 character studio により、到着点としてターゲット サーフェスの直近の点が選択されます。
[直近](Closest)を選択し、[フレームごと](Every Frame)がオフになっている場合は、character studio によりシミュレーションの開始に 1 度だけ代理オブジェクトの到着点が選択されます。
フレームごとオンの場合、character studio によりフレームごとに代理オブジェクトの到着点が選択されます。 この機能は、[直近](Closest)を選択した場合にのみ有効です。既定値ではチェックマークは付いていません。
[フレームごと](Every Frame)は、アニメーション中ターゲット オブジェクトが回転している場合に便利ですが、計算に時間がかかります。
- オフセットを表示
- このチェック ボックスにチェックマークが付いている場合、サーフェス オブジェクト内の各頂点から発する線として、サーフェスに対して垂直なオフセットの距離を表示します。
[接近](Approach)領域
[高さ](Height)および[降下開始](Descent)の設定では、共に代理オブジェクトの到着に使用するパスを指定できます。これらの設定によって、柔軟な、段階的な着地からヘリコプターのような降下方法まで、動作をさまざまな範囲に指定できます。
いずれの場合も、実際の偏差は -1 から 1 の間のランダムな数字を[偏差](Deviation)の設定に乗算することにより計算され、その結果を適当な値に乗算します。
- 高さ
- 面の法線に沿った、到着ポイントからの距離を指定します。
代理オブジェクトは、到着ポイントに降下する前に、まずこのポイントに向かいます。
- 偏差
- 高さ設定にランダムなバリエーションを追加します。
実際の偏差は、-1 から 1 の間のランダムな数字を[偏差](Deviation)の設定に乗算することにより計算され、その結果を[高さ](Height)の設定に乗算します。
- 降下開始
- 代理オブジェクトが降下を開始する場所を、代理オブジェクトと到着ポイントとの間の距離として指定します。 注: [降下開始](Descent Start)(Descent Start)では、代理オブジェクトの降下の際に、降下開始時に比べてスピードが速すぎたり、減速度が低すぎるために飛び越したりしないように、十分高い値を設定してください。
- 偏差
- [降下開始](Descent Start)の設定に対し、ランダムな変化を追加します。
実際の偏差は、-1 から 1 の間のランダムな数字を[偏差](Deviation)の設定に乗算することにより計算され、その結果を[降下開始](Descent Start)の設定に乗算します。
- この法線をオフにする
- このチェック ボックスにチェックマークが付いている場合、接近のベクトルを設定すると、最終的着陸体制時の角度を指定できます。既定値ではチェックマークが付いていません。
[X]/[Y]/[Z]これらのスピナーを使用して、最終的な接近ベクトルをワールド座標で指定します。 たとえば、ベクトルを既定値の設定である X=0、Y=0、Z=1 に指定すると、代理オブジェクトは垂直方向のワールド軸に沿ってターゲットに接近します。
- シード
-
[偏差](Deviation)設定の計算に使用するランダムな数字に影響します。
異なるサーフェス到着動作で似たようなランダム化を行うには、スピードに対して同じ値を使用します。
- [ターゲット アイコン カラー見本]
-
ターゲット アイコンを描くためのカラーを表示します。既定値は濃い青色です。
ターゲットを表示ターゲット アイコンが表示できるようになります。これは、計算中に新たに代理オブジェクトの仮の目標が計算されたときに表示されます。 [接近](Approach)領域の設定を使用すると、仮の目標が作成されます。既定値ではチェックマークが付いています。
- ターゲット スケール
- ターゲット アイコン全体のサイズを指定します。既定値は 5.0 です。