[回避動作](Avoid)では、代理オブジェクトが距離をおく必要があるオブジェクトを指定できます。群集シミュレーション中に、代理オブジェクトが指定されたオブジェクトに近づくと、代理オブジェクトは、必要に応じて方向を変えたり停止したりして距離を保ちます。
-
 [作成](Create)パネル >
[作成](Create)パネル >  ([ヘルパー](Helpers)) > [オブジェクト タイプ](Object Type)ロールアウト > [群集](Crowd) > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > [新規作成](New)ボタンをクリック > [動作タイプを選択](Select Behavior Type)ダイアログ ボックス > [回避動作](Avoid Behavior)
([ヘルパー](Helpers)) > [オブジェクト タイプ](Object Type)ロールアウト > [群集](Crowd) > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > [新規作成](New)ボタンをクリック > [動作タイプを選択](Select Behavior Type)ダイアログ ボックス > [回避動作](Avoid Behavior)
-
群集オブジェクトを選択 >
 [修正](Modify)パネル > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > [新規作成](New)ボタンをクリック > [動作タイプを選択](Select Behavior Type)ダイアログ ボックス > [回避動作](Avoid Behavior)
[修正](Modify)パネル > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > [新規作成](New)ボタンをクリック > [動作タイプを選択](Select Behavior Type)ダイアログ ボックス > [回避動作](Avoid Behavior)
-
群集オブジェクトを選択 > [修正](Modify)パネル > [セットアップ](Setup)ロールアウト > [動作](Behaviors)領域 > ドロップダウン リストから[回避動作](Avoid)を選択
 コマンド入力: [作成](Create)パネル
コマンド入力: [作成](Create)パネル  [ヘルパー](Helpers) [オブジェクト タイプ](Object Type)ロールアウト [群集](Crowd) [セットアップ](Setup)ロールアウト [新規作成](New)ボタン [回避動作](Avoid Behavior) コマンド入力: 群集オブジェクトを選択 [修正](Modify)パネル [セットアップ](Setup)ロールアウト [新規作成](New)ボタン [回避動作](Avoid Behavior)
[ヘルパー](Helpers) [オブジェクト タイプ](Object Type)ロールアウト [群集](Crowd) [セットアップ](Setup)ロールアウト [新規作成](New)ボタン [回避動作](Avoid Behavior) コマンド入力: 群集オブジェクトを選択 [修正](Modify)パネル [セットアップ](Setup)ロールアウト [新規作成](New)ボタン [回避動作](Avoid Behavior)この動作では[衝突回避の操作](Steer To Avoid)、[反発](Repel)、[ベクトル フィールド](Vector Field)という 3 種類の方法を使用して、代理オブジェクト同士、および代理オブジェクトと他のオブジェクトを回避させることができます。
[衝突回避の操作](Steer to Avoid)動作は、近くまで来たときに、お互いを避ける動物に最適です。飛べない動物および魚は通常このように行動します。回避モーションは突然起こる場合があります。ほとんどの場合、そのアクションが発生する時間が比較的短いためです。
対照的に、反発回避動作は反発する磁場の連続的アクションを真似たものです。鳥、こうもり、および飛んでいる虫をアニメートするには、[反発](Repel)領域に大きな値を使用してください。これにより、エラーの許容範囲を維持しながらスムーズにお互いを回避するように設定できます。この反発力は、移動の方向に関わらず、すべての側面からの侵入を防ぎます。したがって、主に[衝突回避の操作](Steer to Avoid)に基づいている動物の場合でも、混雑した通り道を通過するときの空間的分離を維持するために、ある程度の反発回避が必要です。反発回避のフォースは、常に均一で球状に外方向を向いています。
[ベクトル フィールド](Vector Field)回避を使用するのは、群集のメンバが、不定の 3ds Max オブジェクトの、より複雑なシェイプに衝突することを避ける必要がある場合です。 [ベクトル フィールド](Vector Field)回避の外向きのフォースは、任意のオブジェクトのシェイプを形成するように構築される場合があります。たとえば、沈没船の回りを泳ぐ魚の群れのアニメーションを作成するとします。この場合、回りの空間に船のシェイプを延長するようにベクトル フィールドを作成できます。このフィールドは細かく計算され、船のサーフェス法線を、船を囲む 3D ラティス中に転換します。これらの法線は 3D ラティス中の「航路標識」として空間に張り出し、魚に船のシェイプを回避して泳ぐ最良の方法を伝えます。魚がベクトル フィールド ラティスの空間に入ると、その魚は船のサーフェスから離れる方向の回避フォースに従って正確に反発されます。
インタフェース
- [ターゲット ボタン](target button)
- 単一のターゲットを指定します。このボタンをクリックして、ビューポート内のターゲット オブジェクトをクリックします。ターゲットの名前がボタン上に表示されます。
[複数選択](次の項目を参照)を使用して複数のターゲットを選択する場合は、「複数」という語がボタン上に表示されます。 ターゲットとして指定されたオブジェクトを参照するには、[複数選択](Multiple Selection)ボタンをクリックします。
 複数選択
複数選択- [選択](Select)ダイアログ ボックスが開き、複数のターゲットを選択できます。複数のターゲットがある場合は、代理オブジェクトを設定して、グループの中で一番近いターゲットに向かって移動させたり、ターゲットの位置の計算された平均値に移動させたりできます。
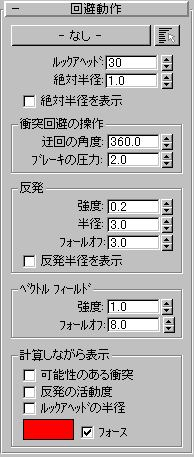
- ルックアヘッド
- 現在のフレームの前のフレームで、character studio によって衝突の可能性が検索されるフレームの数です。既定値は 30 です。
- 絶対半径
- 代理オブジェクトの境界球と複合的に作用して侵入を禁止するターゲットの基点からの距離です。既定値は 1.0 です。 ヒント: 絶対半径の中心は基点のため、ボックス プリミティブのように基点が中心にないターゲット オブジェクトの場合には、回避が期待どおりに機能しません。最良の結果を得るには、[階層](Hierarchy)パネル [基点を調整](Adjust Pivot)ロールアウト コントロールを使用して基点をオブジェクトの中心に配置してください。
- 絶対半径を表示
- [絶対半径](Hard Radius)の設定値の広がりを描くワイヤフレーム球の表示を有効にします。既定値ではチェックマークは付いていません。
[衝突回避の操作](Steer To Avoid)領域
[衝突回避の操作](Steer To Avoid)は代理オブジェクトによって使用され、予想される将来の衝突を代理オブジェクトの現在のスピードと方向に基づいて正確に回避します。この方法を使用する代理オブジェクトどうしは、お互いに非常に近くまで接近することができます。
- 迂回の角度
- 代理オブジェクトが減速して待機するのではなく、回避しながら進むために必要な最大回転角度を、代理オブジェクトの目標の方向を基準にして示したものです。既定値は 360 です。範囲は 0 ~ 360 です。 ヒント: 回避のための迂回を無効にして、停止だけを許可するには、[迂回の角度](Detour Angle)を 0 に設定します。これによって、代理オブジェクトは目的地の方向に向いたままになり、コンサート終了後に出口に並ぶ聴衆のように、前方の道が空くまで速度を低下させるか、待たなければならなくなります。
- ブレーキの圧力
- 代理オブジェクトが回避オブジェクトに遭遇したときに、衝突を回避する強度を定義します。この値が大きいほど、代理オブジェクトの速度が低下し、場合によっては停止します。この値が小さいほど、代理オブジェクトは障害物を迂回して動き続けようとします。場合によっては、予期しない方向へそれてしまうことがあります。既定値は 2.0 です。
[反発](Repel)領域
[反発](Repel)は空間的な位置のみに基づいて作用する一般的な分離力です。代理オブジェクトはこれを使用して、お互いに側面から衝突するような状況や、[衝突回避の操作](Steer To Avoid)が機能できない程近くに到達することを避けます。
- 強度
- 反発のフォースの強さを指定します。値が高いほど、反発のフォースは強くなります。既定値は 0.2 で、範囲は 0.0 ~ 1.0 です。
- 半径
- 反発力による回避が感知され実行される、代理オブジェクトの境界球からの最長距離です。既定値は 3.0 です。
- フォールオフ
- [反発](Repel)の半径と[絶対半径](hard radius)との間で強度が減衰する率です。値 1.0 は、線形フォールオフを意味します。高い値に設定すると強度 0 へ減衰する速度が距離と共に速くなり、反発力の効果を代理オブジェクトの絶対半径の近辺に集中させることになります。低い値に設定すると、減衰の速度が低下します。[フォールオフ](Falloff)の設定値 0.0 は[半径](Radius)の距離での強度が[絶対半径](Hard Radius)における値と同じであることを意味します。既定値は 3.0 です。
- 反発半径を表示
- [反発](Repel)の設定値の広がりを描くワイヤフレーム球の表示を有効にします。既定値ではチェックマークは付いていません。
[ベクトル フィールド](Vector Field)領域
シーン中のオブジェクトに既に [ベクトル フィールド](Vector Field)スペース ワープを適用している場合、そのベクトル フィールドを回避するオブジェクトとして指定できます。相違点は次のとおりです。[スペース ワープ](Space Warp)動作で使用した場合、代理オブジェクトはベクトル フィールドを使用して、フィールドのベクトルに垂直な方向に移動するように導かれることによって、オブジェクトを回避します。[回避](Avoid)動作で使用した場合、代理オブジェクトは単にベクトルの方向に遠ざかるように移動します。
- 強度
- 高い値に設定すると、影響が強くなります。代理オブジェクトは、フィールドに対して垂直に動くようになります。既定値は 1.0 で、範囲は 0.0 ~ 1.0 です。
- フォールオフ
- この値が高いと、距離が遠のくほどベクトル フィールドの影響が急速に 0 に落ちます。そのため、代理オブジェクトの不動半径に近いほどその効果は大きくなります。既定値は 8.0 です。
[計算しながら表示](Display During Solve)領域
以下のスイッチは群集シミュレーションのデバッグ用として使用します。計算中に、グラフィカルな記号を使用して[回避](Avoid)動作の異なる側面のシミュレーション情報が表示されます。
- 可能性のある衝突
- 代理オブジェクトから可能性のある衝突の位置まで、緑色の直線が表示されます。既定値ではチェックマークが付いていません。
- 反発の活動度
- 反発力が作用しているときに、代理オブジェクトとターゲットとの間に白い直線が表示されます。既定値ではチェックマークが付いていません。
- ルックアヘッドの半径
- 可能性のある衝突を確認するために使用された現在の距離を示す球が表示されます。
- カラー見本
- 計算中に、回避力ベクトルの描画に使用されるカラーが表示されます。ボックスをクリックすると、別の色を選択できます。既定値は赤です。
- フォース
- このチェック ボックスにチェックマークが付いている場合、回避動作によって 1 つ以上の代理オブジェクトに作用するフォースが、シミュレーション計算中に色付きの直線としてビューポートに表示されます。既定値ではチェックマークが付いています。