活动 6:优化设置、求解和查看结果
在本活动中,您将生成接触,然后优化接触条件以缩短分析时间。您希望接触具有足够的摩擦力,从而在推进器块停止移动后,滚子可以拉动钢板。
最初,会在所有实体之间生成接触。若要缩短分析时间,可以抑制不可能的接触,例如,在本例中,抑制自接触。由于推进器块和滚子之间永远不会相互接触,因此还要抑制该接触对。在优化设置后,对分析求解并查看结果。
在本活动中,您将完成以下任务:
- 生成具有足够摩擦力的接触以在滚子下移动钢板
- 查看接触条件并抑制此分析中不可能发生的接触,以缩短求解时间
- 查看设置预检查以确保分析已准备好进行求解
- 对分析求解
- 查看结果
前提条件
- 活动 5 已完成。
步骤
使用 0.3 作为“默认摩擦系数”,在所有实体之间生成接触。
- 单击
 (“仿真”工作空间 >“设置”选项卡 >“接触”面板 >“全局接触”)以打开“全局接触”对话框。
(“仿真”工作空间 >“设置”选项卡 >“接触”面板 >“全局接触”)以打开“全局接触”对话框。 - 在“全局接触”对话框中,将“默认摩擦系数”设置为 0.3。
- 单击“生成”以关闭对话框并生成接触。
- 单击
抑制自接触以及推进器块与滚子之间的接触。
在浏览器中,将光标悬停在
 “接触”上,然后单击
“接触”上,然后单击  “编辑”以打开“运动仿真接触管理器”对话框。这将显示模型中所有实体之间所有接触对的矩阵。
“编辑”以打开“运动仿真接触管理器”对话框。这将显示模型中所有实体之间所有接触对的矩阵。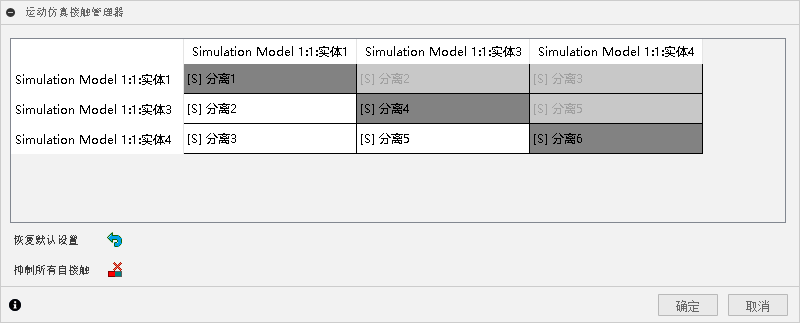 注意:此模型中有三个实体,因此矩阵为 3x3。由于关系是对称的,因此无法选择矩阵上半部分中的单元。
注意:此模型中有三个实体,因此矩阵为 3x3。由于关系是对称的,因此无法选择矩阵上半部分中的单元。单击
 “抑制所有自接触”。
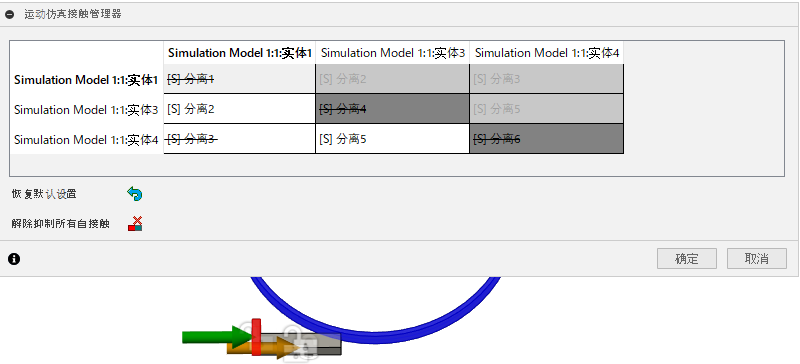
“抑制所有自接触”。请注意,绘制了一条穿过表示自接触的每个对角接触的直线。
单击剩余的三个单元中的每个单元,以在画布中亮显每个接触所表示的实体,然后,对于表示推进器实体和滚子的接触,在该单元中单击鼠标右键,然后单击“抑制接触”。
单击“确定”以关闭“运动仿真接触管理器”对话框,并抑制选定的接触对。
查看预检查状态并确定分析是否已准备好运行。
单击
 (“仿真”工作空间 >“设置”选项卡 >“求解”面板 >“预检查”)以打开“预检查”对话框。
(“仿真”工作空间 >“设置”选项卡 >“求解”面板 >“预检查”)以打开“预检查”对话框。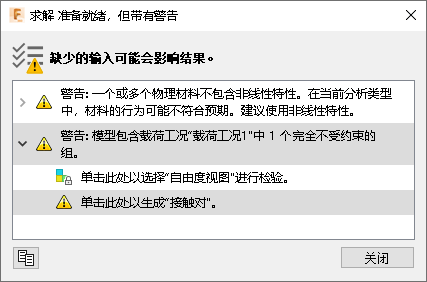
Fusion 仿真支持多个隐式仿真分析类型,这些类型要求模型完全受约束。即,模型的所有零件均必须受约束,不存在刚性模态。运动仿真是一种显式技术,允许刚体模态,并且零件之间的接触约束的性质通常会约束这些模态。在此模型中,尽管钢板具有一组边界条件,允许它在 X 方向自由移动,但钢板与滚子之间的接触以及推进器块和钢板之间的接触完全约束此刚体模式。
注意:这些问题不影响运动仿真中的显式公式,因此您可以忽略它们并求解分析。单击“关闭”以关闭“预检查”对话框。
对分析求解。
单击
 (“仿真”工作空间 >“设置”选项卡 >“求解”面板 >“求解”)以打开“求解”对话框。
(“仿真”工作空间 >“设置”选项卡 >“求解”面板 >“求解”)以打开“求解”对话框。确认已选择分析,然后单击“对 1 个分析求解”。
当分析完成后,单击“关闭”以关闭“作业状态”对话框。
查看应变结果。
活动 6 概要
在本活动中,您将完成以下任务:
- 生成了接触对
- 查看了接触条件并抑制了在此分析中不太可能发生的接触
- 查看了设置预检查以确保分析已准备好进行求解
- 对分析进行了求解
- 查看了结果。