Exercice 6 : optimisation de la configuration, résolution et examen des résultats
Dans cet exercice, vous allez générer les contacts, puis optimiser les conditions de contact pour réduire le temps d'analyse. Vous voulez assez de friction au contact de sorte que le rouleau tire la dalle en acier après que le bloc poussoir a cessé de bouger.
Le contact est généré, initialement, entre tous les corps. Pour réduire le temps d’analyse, vous pouvez supprimer les contacts improbables, comme dans ce cas, le contact personnel. Puisque le bloc poussoir et le rouleau ne se touchent jamais, vous masquez également cette paire de contacts. Une fois la configuration optimisée, vous pouvez résoudre l’analyse et examiner les résultats.
Dans cet exercice, vous allez :
- Générer des contacts avec suffisamment de friction pour déplacer la dalle en acier sous le rouleau
- Vérifier les conditions de contact et supprimer celles qui ne se produisent probablement pas dans cette analyse afin de réduire le temps de résolution
- Vérifier la configuration de la vérification préalable pour vous assurer que l'analyse est prête à être résolue
- Résoudre l'analyse
- Examinez les résultats.
Conditions préalables
- L’exercice 5 est terminé.
Étapes
Générez un contact entre tous les corps, à l’aide d’un coefficient de frottement par défaut de 0,3.
- Cliquez sur
 (espace de travail Simulation > onglet Configuration > panneau Contacts > Contacts globaux) pour ouvrir la boîte de dialogue Contacts globaux.
(espace de travail Simulation > onglet Configuration > panneau Contacts > Contacts globaux) pour ouvrir la boîte de dialogue Contacts globaux. - Dans la boîte de dialogue Contact global, définissez le coefficient de frottement par défaut sur 0,3.
- Cliquez sur Générer pour fermer la boîte de dialogue et générer les contacts.
- Cliquez sur
Supprimez les contacts et les contacts entre le bloc poussoir et le rouleau.
Dans le navigateur, placez le curseur sur
 Contacts, puis cliquez sur
Contacts, puis cliquez sur  Modifier pour ouvrir la boîte de dialogue Gestionnaire de contacts de simulation d’événements. Elle affiche une matrice de toutes les paires de contact entre tous les corps du modèle.
Modifier pour ouvrir la boîte de dialogue Gestionnaire de contacts de simulation d’événements. Elle affiche une matrice de toutes les paires de contact entre tous les corps du modèle.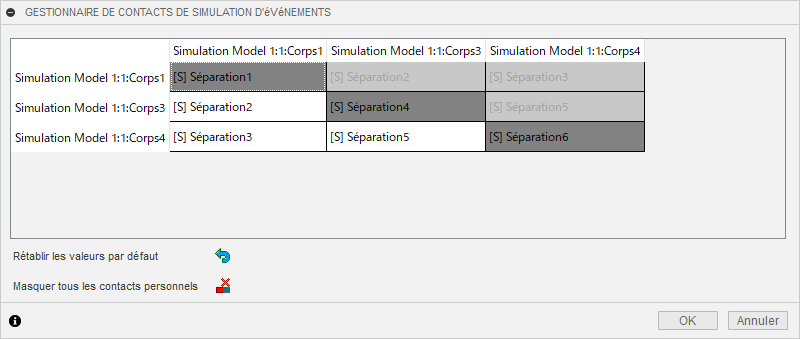 Remarque : il existe trois corps dans ce modèle, donc la matrice est 3x3. Les relations étant symétriques, les cellules situées dans la moitié supérieure de la matrice ne peuvent pas être sélectionnées.
Remarque : il existe trois corps dans ce modèle, donc la matrice est 3x3. Les relations étant symétriques, les cellules situées dans la moitié supérieure de la matrice ne peuvent pas être sélectionnées.Cliquez sur
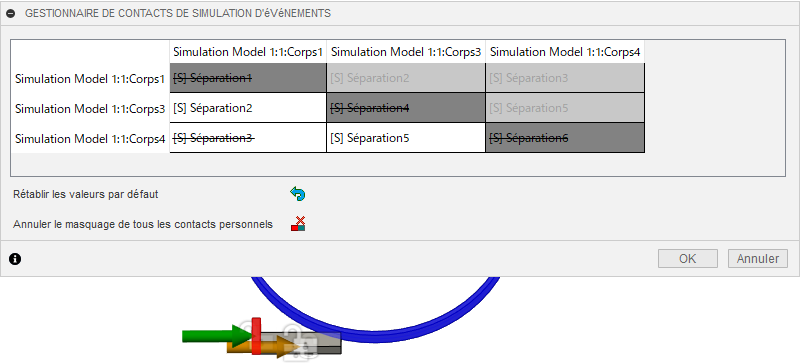
 Masquer tous les contacts personnels.
Masquer tous les contacts personnels.Notez qu’une ligne est dessinée à travers chacun des contacts en diagonale qui représentent un contact personnel.
Cliquez sur chacune des trois cellules restantes pour mettre en surbrillance dans la zone de dessin les corps que chaque contact représente, puis, pour le contact représentant le corps du bloc poussoir et le rouleau, cliquez avec le bouton droit de la souris dans la cellule et cliquez sur Masquer le contact.
Cliquez sur OK pour fermer la boîte de dialogue Gestionnaire de contacts de simulation d’événements et supprimez les paires de contacts sélectionnées.
Vérifiez l’état de la vérification préalable et déterminez si l’analyse est prête à être exécutée.
Cliquez sur
 (espace de travail Simulation > onglet Configuration > panneau Résoudre > Vérification préalable) pour ouvrir la boîte de dialogue Vérification préalable.
(espace de travail Simulation > onglet Configuration > panneau Résoudre > Vérification préalable) pour ouvrir la boîte de dialogue Vérification préalable.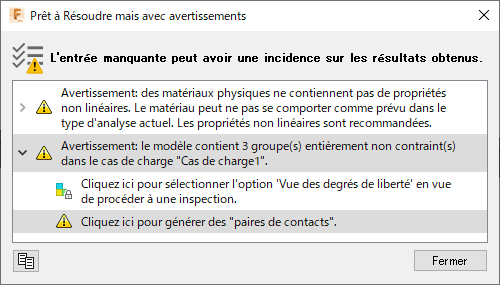
Fusion Simulation prend en charge plusieurs types d’études de simulation implicites qui nécessitent que le modèle soit entièrement contraint. Ainsi, toutes les pièces du modèle doivent être contraintes de sorte qu’il n’existe aucun mode rigide. La simulation d’événements est une technique explicite qui autorise les modes de corps rigide et la nature des contraintes de contact entre les pièces contraint généralement ces modes. Dans ce modèle, bien que la dalle en acier possède un ensemble de conditions aux limites qui lui permettent de se déplacer librement dans la direction X, le contact entre la dalle en acier et le rouleau, et le contact entre le bloc poussoir et la dalle en acier, contraignent entièrement ce mode de corps rigide.
Remarque : ces problèmes n’affectent pas une formulation explicite, comme dans la simulation d’événement. Vous pouvez donc les ignorer et résoudre l’analyse.Cliquez sur Fermer pour fermer la boîte de dialogue de vérification préalable.
Résolvez l’analyse.
Cliquez sur
 (espace de travail Simulation > onglet Configuration > panneau Résoudre > Résoudre) pour ouvrir la boîte de dialogue Résoudre.
(espace de travail Simulation > onglet Configuration > panneau Résoudre > Résoudre) pour ouvrir la boîte de dialogue Résoudre.Vérifiez que l’étude est sélectionnée, puis cliquez sur Résoudre 1 étude.
Une fois l’analyse terminée, cliquez sur Fermer pour fermer la boîte de dialogue État de la tâche.
Examinez les résultats de déformation.
Résumé de l'exercice 6
Dans cet exercice, vous avez
- Généré des paires de contacts
- Examiné les conditions de contact et supprimé celles qui ne se produisent probablement pas dans cette analyse
- Pré-vérifié la configuration pour vous assurer que l'analyse était prête à être résolue
- Résolu l'analyse
- Examiné les résultats.