Exercice 3 : application de contraintes
Dans cet exercice, vous contraignez entièrement le corps rigide et appliquez une translation imposée à la pièce mobile, ce qui lui permet de se déplacer dans la direction -Z tout en empêchant le mouvement dans les directions X et Y. Pour contraindre le modèle, vous allez
- Appliquer des contraintes structurelles fixes au corps rigide
- Définir la face sur laquelle appliquer la translation prédéfinie
- Appliquer une translation imposée à la pièce mobile
- Définir la courbe de multiplicateur qui contrôle la translation imposée.
Conditions préalables
- L’exercice 2 est terminé.
Étapes
Fixez entièrement le corps rigide dans les six degrés de liberté de translation et de rotation.
Cliquez sur
 (espace de travail Simulation > onglet Configuration > panneau Contraintes > Contraintes structurelles) pour ouvrir la boîte de dialogue Contraintes structurelles.
(espace de travail Simulation > onglet Configuration > panneau Contraintes > Contraintes structurelles) pour ouvrir la boîte de dialogue Contraintes structurelles.Vérifiez que le Type de contrainte est défini sur Fixe.
Cliquez sur la pièce femelle pour la sélectionner comme cible.
Remarque : puisqu’il s’agit d’un corps rigide, le corps entier est sélectionné lorsque vous cliquez sur une arête ou une face.Notez que trois degrés de liberté de rotation apparaissent dans la boîte de dialogue Contraintes structurelles en plus du degré de liberté de translation habituel. Les éléments appartenant aux corps rigides prennent en charge six degrés de liberté.
Vérifiez que les options Ux, Uy, Uz, Rx, Ry et Rz Axe sont toutes activées, comme indiqué par la surbrillance bleue.
Cliquez sur OK pour définir les contraintes et fermer la boîte de dialogue.
Définissez la face avant de la pièce en mouvement comme emplacement pour appliquer une translation imposée.
Remarque : dans Fusion, les translations imposées sont considérées comme des contraintes plutôt que des charges, car elles contrôlent la position d’un objet. Cette translation pousse les pièces ensemble.Cliquez sur
 (espace de travail Simulation > onglet Configuration > panneau Contraintes > Translation imposée) pour ouvrir la boîte de dialogue Translation imposée.
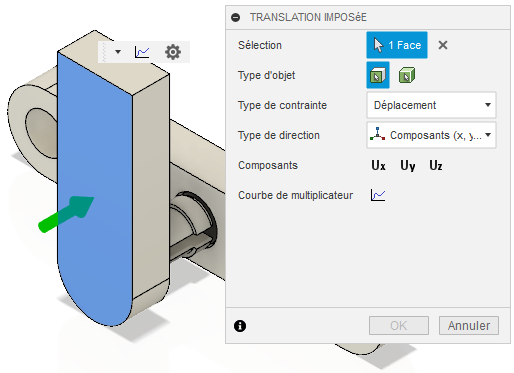
(espace de travail Simulation > onglet Configuration > panneau Contraintes > Translation imposée) pour ouvrir la boîte de dialogue Translation imposée.Vérifiez que le type d’objet est défini sur
 Faces.
Faces.Vérifiez que le Type de contrainte est défini sur Déplacement.
Cliquez sur la face avant de la pièce en mouvement pour l’identifier comme étant la sélection.
Appliquez une translation imposée de 10 mm dans la direction -Z sur la face avant de la pièce en mouvement.
Vérifiez que le Type de direction est défini sur Composants (x, y, z).
Cliquez sur les trois composants, Ux, Uy et Uz pour les sélectionner.
Remarque : pour éviter les mouvements X et Y sans appliquer de contrainte de fixité distincte, sélectionnez Ux et Uy, mais conservez la magnitude à zéro.Entrez une valeur de -10 mm dans le champ Magnitude Uz.
Définissez la courbe de multiplicateur qui contrôle la translation imposée à l’aide des valeurs indiquées dans l’image ci-dessous :
Dans la boîte de dialogue Translation imposée, cliquez sur
 Courbe de multiplicateur.
Courbe de multiplicateur.Entrez les points de données Temps et Multiplicateur indiqués dans l’image suivante :
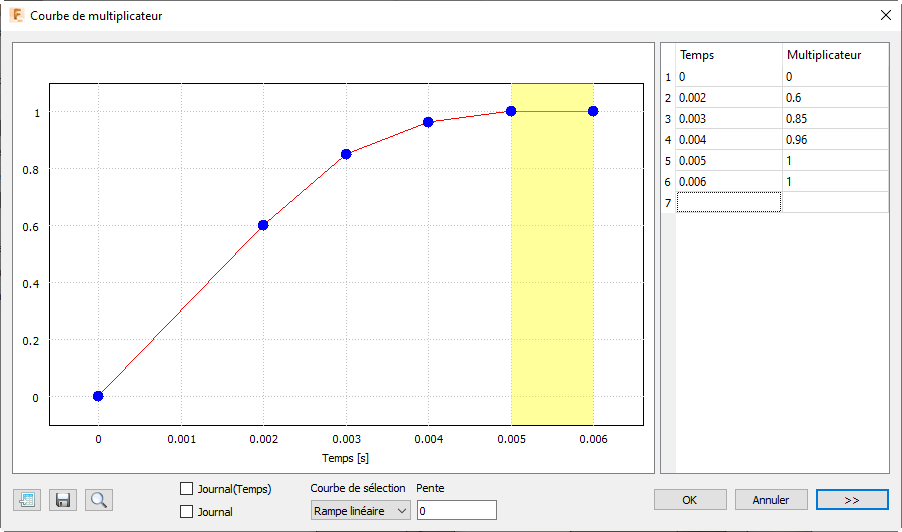 Remarque : cette courbe décélère progressivement le déplacement à l’approche de la fin de l’événement. La position est ensuite constante pour une milliseconde supplémentaire, pendant laquelle vous verrez les oscillations de pliage qui continuent après l’insertion au niveau des doigts de verrouillage de l’assemblage avec emboîtement élastique. Les deux premiers points de données indiquent une vitesse de 3 000 mm/seconde (0,6 * 10 mm / 0,002 s). Dans la procédure suivante, nous allons appliquer une vitesse initiale à cette pièce pour éviter le choc d’une accélération soudaine allant de zéro à 3 000 mm/seconde.
Remarque : cette courbe décélère progressivement le déplacement à l’approche de la fin de l’événement. La position est ensuite constante pour une milliseconde supplémentaire, pendant laquelle vous verrez les oscillations de pliage qui continuent après l’insertion au niveau des doigts de verrouillage de l’assemblage avec emboîtement élastique. Les deux premiers points de données indiquent une vitesse de 3 000 mm/seconde (0,6 * 10 mm / 0,002 s). Dans la procédure suivante, nous allons appliquer une vitesse initiale à cette pièce pour éviter le choc d’une accélération soudaine allant de zéro à 3 000 mm/seconde.Cliquez sur OK pour accepter la courbe.
Cliquez sur OK pour appliquer la translation imposée et fermer la boîte de dialogue.
Résumé de l’activité 3
Dans cette activité, vous avez
- Appliqué des contraintes structurelles fixes au corps rigide
- Défini la face avant de la pièce en mouvement comme emplacement pour appliquer la translation prédéfinie
- Appliqué une translation imposée à la pièce mobile
- Défini la courbe de multiplicateur qui contrôle la translation imposée.