アクティビティ 6: 設定の最適化、解析、および結果の確認を行う
このアクティビティでは、解析時間を短縮するために、接触を生成した後に接触条件を最適化します。押し出しブロックの移動が停止した後に、ローラーが鋼スラブを引っ張る接触には十分な摩擦が必要です。
最初に、すべてのボディ間に接触が生成されます。解析時間を短縮するために、可能性の低い接触(この場合は自己接触など)を抑制します。押し出しブロックとローラーは互いに接触しないので、その接触ペアも抑制します。設定を最適化したら、解析を実行して結果を確認します。
このアクティビティの内容
- ローラーの下の鋼スラブを移動するために十分な摩擦がある接触を生成する
- 接触条件を確認し、この解析でほとんど発生しない条件を省略して、解析時間を短縮する
- 解析の準備が整っていることを確認するために、プリチェックの設定を確認する
- 解析を実行する
- 結果を確認する
前提条件
- アクティビティ 5 を完了していること。
ステップ
[既定の摩擦係数]を 0.3 にして、すべてのボディ間の接触を生成します。
 ([シミュレーション]作業スペース > [設定]タブ > [接触]パネル > [グローバル接触])をクリックし、[グローバル接触]ダイアログを開きます。
([シミュレーション]作業スペース > [設定]タブ > [接触]パネル > [グローバル接触])をクリックし、[グローバル接触]ダイアログを開きます。- [グローバル接触]ダイアログで、[既定の摩擦係数]を 0.3 に設定します。
- [生成]をクリックしてダイアログを閉じ、接触を生成します。
自己接触および押し出しブロックとローラーの間の接触を抑制します。
ブラウザで、
 [接触]にカーソルを合わせ、
[接触]にカーソルを合わせ、 [編集]をクリックして[イベント シミュレーションの接触マネージャ]ダイアログを開きます。モデル内の全ボディ間の全接触ペアのマトリックスが表示されます。
[編集]をクリックして[イベント シミュレーションの接触マネージャ]ダイアログを開きます。モデル内の全ボディ間の全接触ペアのマトリックスが表示されます。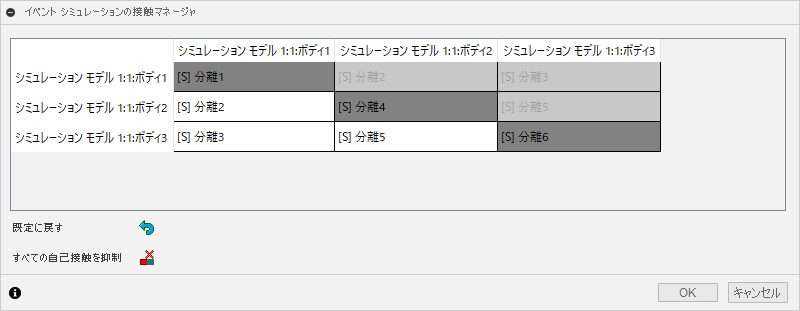 注: このモデルには 3 つのボディがあるため、マトリックスは 3x3 です。関係は対称であるため、マトリックスの上半分のセルは選択できません。
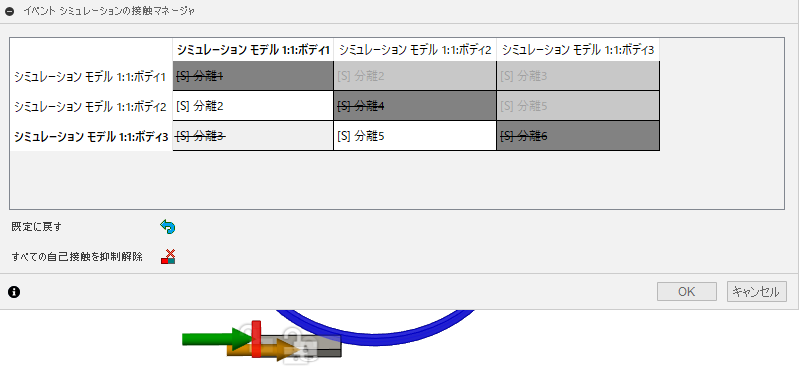
注: このモデルには 3 つのボディがあるため、マトリックスは 3x3 です。関係は対称であるため、マトリックスの上半分のセルは選択できません。 [すべての自己接触を抑制]をクリックします。
[すべての自己接触を抑制]をクリックします。自己接触を表す各対角線の接触を通る線が描画されます。
残りの 3 つの各セルをクリックして、キャンバス内で各接触が表すボディをハイライト表示し、次に押し出しボディとローラーを表す接触について、セルを右クリックして[接触を抑制]をクリックします。
[OK]をクリックして[イベント シミュレーションの接触マネージャ]ダイアログを閉じ、選択した接触ペアを抑制します。
プリチェック ステータスを確認し、解析の実行準備が整っているかどうかを判断します。
 ([シミュレーション]作業スペース > [設定]タブ > [解析]パネル > [プリチェック])をクリックして、[プリチェック]ダイアログを開きます。
([シミュレーション]作業スペース > [設定]タブ > [解析]パネル > [プリチェック])をクリックして、[プリチェック]ダイアログを開きます。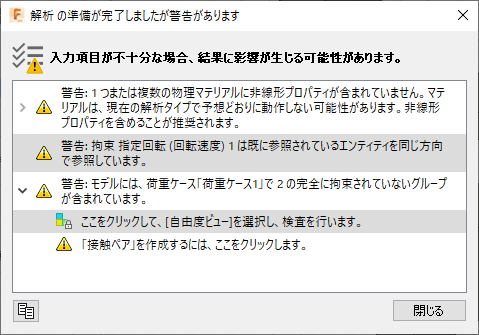
Fusion Simulation は、モデルを完全に拘束する必要がある複数の暗黙的なシミュレーション スタディ タイプをサポートしています。つまり、モデルのすべてのパーツを拘束して、剛体モードが存在しないようにします。イベント シミュレーションは、剛体モードを可能にする明示的な技術です。パーツ間の接触拘束の性質により、通常、これらのモードは制約されます。このモデルでは、鋼スラブには X 方向に自由に移動できる境界条件のセット、鋼スラブとローラーの間の接触、および押し出しブロックと鋼スラブの間の接触があり、この剛体モードを完全に拘束します。
注: これらの問題は、イベント シミュレーションに含まれる明示的な定式化には影響しないため、無視して解析を実行できます。[閉じる]をクリックして、プリチェックのダイアログを閉じます。
解析を実行します。
 ([シミュレーション]作業スペース > [設定]タブ > [解析]パネル > [解析])をクリックして、[解析]ダイアログを開きます。
([シミュレーション]作業スペース > [設定]タブ > [解析]パネル > [解析])をクリックして、[解析]ダイアログを開きます。スタディが選択されていることを確認し、[1 スタディを解析]をクリックします。
解析が完了したら、[閉じる]をクリックして[ジョブ ステータス]ダイアログを閉じます。
ひずみの結果を確認します。
アクティビティ 6 のサマリー
このアクティビティの内容
- 接触ペアを生成しました
- 接触条件を確認し、この解析でほとんど発生しない条件を抑制しました
- 解析する準備が整っていることを確認するために、設定されたプリチェックを確認しました
- 解析を実行しました
- 結果を確認しました