アクティビティ 3: 解析を実行して結果を解釈する
このアクティビティの内容
- 解析を実行する
- 結果を表示し、塑性テーブルで座屈が発生するかどうかを判断します
- 3 つの振動モードをアニメーション表示し、座屈荷重係数が最も低いモードを識別します。
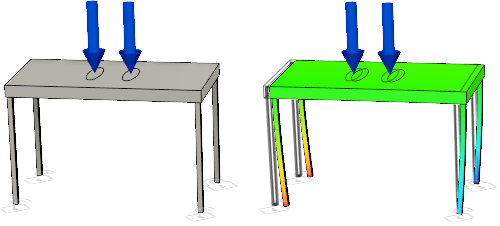
解析前の塑性テーブル(左)、モード 1 での塑性テーブルの[合計モード変位]の結果(右)。**
前提条件
- アクティビティ 2 を完了していること。
手順
スタディを解析します。
 ([シミュレーション]作業スペース > [設定]タブ > [解析]パネル > [解析])をクリックして、[解析]ダイアログを開きます。
([シミュレーション]作業スペース > [設定]タブ > [解析]パネル > [解析])をクリックして、[解析]ダイアログを開きます。
注: [プリチェック]アイコンに 緑色のチェックマークが表示されています。これは警告がないことを意味し、モデルの解析準備ができていることを示しています。
緑色のチェックマークが表示されています。これは警告がないことを意味し、モデルの解析準備ができていることを示しています。- [1 スタディを解析]をクリックして解析を実行し、ダイアログを閉じます。
注: メッシュ生成と解析の実行には数分かかることがあります。
- 解析が完了したら、[閉じる]をクリックして[ジョブ ステータス]ダイアログを閉じます。
[結果]タブが自動的に開き、結果を参照できます。
[座屈モード 1]の[合計モード変位]結果をアニメーション表示します。[より速い]速度と[双方向]オプションを使用して、完全な座屈変位サイクルを例示します。
- プロットの凡例の横にある[座屈モード]ドロップダウン リストで、[座屈モード 1]が選択されていることを確認します。
 ([シミュレーション]作業スペース > [結果]タブ > [結果ツール]パネル > [アニメーション])をクリックして、[アニメーション]ダイアログを開きます。
([シミュレーション]作業スペース > [結果]タブ > [結果ツール]パネル > [アニメーション])をクリックして、[アニメーション]ダイアログを開きます。- [双方向]オプションをアクティブにして、反復周期的アニメーションを作成します。
- [速度]ドロップダウン リストで、[より速い]を選択します。
 [再生]をクリックします。
[再生]をクリックします。
アニメーションの実行中に、プロットの凡例の横にある[座屈モード]ドロップダウン リストから次の座屈モードを選択します。このモードの形状を観察します。3 つの座屈モードすべてを確認するまで繰り返し、[OK]をクリックして[アニメーション]ダイアログを閉じます。
[座屈モード 1]の結果は次の図のようになるはずです。

通常は、さまざまなモードから最小の座屈荷重係数を求めます。
最初のモードでは、座屈荷重係数が最小になります。3 つすべてのモードで座屈荷重係数が 1 未満の場合、座屈が発生することを意味します。一般に、目的の結果は最初の正の荷重係数です。座屈解析で作成された形状は固有振動数の形状に基づいているため、形状は、座屈が実際にどのように発生するかをミラー化して表示される可能性があります。たとえば、上の図に示す画像では、脚が内側に変位していますが、崩れる場合は脚が外側になることが予測されます。
同じ設定で静的応力解析を実行すると、安全率として 10 より大きい値が得られます。高い安全率は誤解されやすく、設計が有効であることを示唆しています。これが、静的応力解析と構造座屈解析の両方を実行する必要がある理由です。
他の設計の問題と同様に、座屈を回避するための解決策はいくつかあります。次のアクティビティでは、スタディのクローンを作成して材料を変更します。
アクティビティ 3 のサマリー
このアクティビティの内容
- 解析を実行しました
- 結果を表示し、塑性テーブルで座屈が発生するかどうかを判断しました
- 3 つの振動モードをアニメーション表示し、座屈荷重係数が最も低いモードを識別しました。