アクティビティ 2: 拘束と荷重を適用する
このアクティビティでは、床が硬くて滑らかであることを想定しています。脚は床面の上をスライドすることができますが、Y 方向に保持されます。テーブルが無限に移動するのを防ぐために、いずれかの脚の底部をロックします。1 つの点がロックされている状態であれば、テーブルが床の上を無限に移動することなく他の脚を移動することができます。スタディ設定を完了するために、
4 つの脚それぞれの底部に異なる拘束を適用します。
テーブルの上面に荷重を適用します。
自動接触生成を使用して接着接触を作成します。
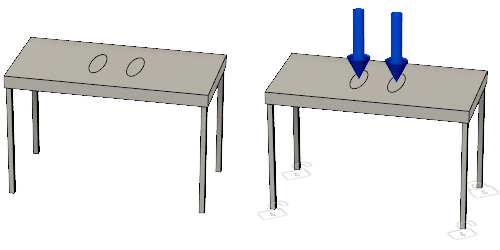
拘束や荷重がない塑性テーブル(左)、拘束と荷重がある塑性テーブル(右)。
前提条件
- アクティビティ 1 を完了していること。
手順
次の方法で脚を拘束します。
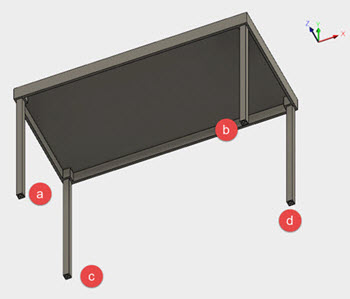
 : [Uy]で固定。
: [Uy]で固定。 : [Ux]と[Uy]で固定。
: [Ux]と[Uy]で固定。 : [Uy]と[Uz]で固定。
: [Uy]と[Uz]で固定。 : [Ux]、[Uy]、および[Uz]のすべての方向で固定。
: [Ux]、[Uy]、および[Uz]のすべての方向で固定。 ([シミュレーション]作業スペース > [設定]タブ > [拘束]パネル > [構造拘束])をクリックして、[構造拘束]ダイアログを開きます。
([シミュレーション]作業スペース > [設定]タブ > [拘束]パネル > [構造拘束])をクリックして、[構造拘束]ダイアログを開きます。- ViewCube の底面をクリックするか、モデルを回転して脚の底部の先端が見えるようにします。
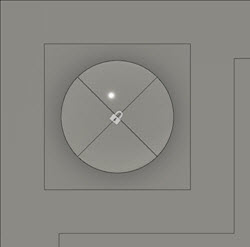
- 脚(a)の底部の、床と接する点を選択します。その点にロックが表示されることに注目してください。
- [構造拘束]ダイアログで、[Ux]軸と[Uz]軸をクリックして選択解除します。
注: これにより、脚(a)では[Uy]が唯一の拘束された軸として残ります。 - [OK]をクリックして拘束を確定し、ダイアログを閉じます。
- 上記の拘束を使用して、テーブルの脚 b、c、および d について手順を繰り返します。
注: 3 つの頂点にはロック解除された南京錠が表示されており、それらが部分的にのみ制限されていて、床に沿って移動できることを示しています。
200 ポンドの人間を支持できるかどうかを確認するために、テーブルの上面に 200 ポンドの荷重を適用します。
注: 構造座屈解析を実行するには、要素を圧縮する荷重が必要です。- ViewCube の上面を選択するか、またはマウスを使用して、モデルを回転してテーブルの上面を表示します。
 ([シミュレーション]作業スペース > [設定]タブ > [荷重]パネル > [構造荷重])をクリックして、[構造荷重]ダイアログを開きます。
([シミュレーション]作業スペース > [設定]タブ > [荷重]パネル > [構造荷重])をクリックして、[構造荷重]ダイアログを開きます。- ドロップダウン メニューを使用して[タイプ]が
 [力]に設定されていることを確認します。
[力]に設定されていることを確認します。 - テーブルの上面にある 2 つのフットプリントを選択します。
- ベクトルの矢印がテーブルを圧縮する力を示していることを確認します。
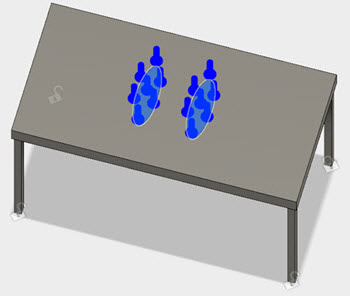
- [構造荷重]ダイアログで、[大きさ]に 200 と入力します。
- [OK]をクリックして変更内容を確定し、ダイアログを閉じます。
ヒント: 座屈を発生させるために必要な力を簡単に見つけるには、大きさに値 1 を使用します。座屈荷重係数が、臨界座屈力になります。モデルを構成するボディの間の接触を定義します。
注: 脚がテーブルと同じ場所にあるため、自動接触生成を使用して接着接触を作成できます。 ([シミュレーション]作業スペース > [設定]タブ > [接触]パネル > [自動接触])をクリックして、[自動接触]ダイアログを開きます。
([シミュレーション]作業スペース > [設定]タブ > [接触]パネル > [自動接触])をクリックして、[自動接触]ダイアログを開きます。
パーツはすべて同じ場所にあるため、既定の許容値 0.004 in を受け入れることができます。- [自動接触]ダイアログで、[生成]をクリックして接触を生成します。
アクティビティ 2 のサマリー
このアクティビティでは、硬くて滑らかな床を想定しています。適切な解析設定を完了するために、
- 4 つの脚それぞれの底部に異なる拘束を適用しました
- テーブルの上面に荷重を適用しました
- 自動接触生成を使用して接着接触を作成しました。