[シミュレーション]作業スペースのリモート拘束
リモート拘束は、モデルから離れた空間内の点からモデルの移動を制限します。モデル上のターゲット面、固定する自由度、アンカー位置または空間内の点を定義して、移動を制限します。
リモート拘束は、より複雑なアセンブリをモデリングまたは単純化する場合に便利です。たとえば、デザイン全体をモデリングしなくても、リモート拘束を使用してリモートのボール ジョイントを表すことができます。
リモート拘束は、イベント シミュレーションを除くすべてのメカニカル シミュレーション スタディで提供されます。
さまざまな自由度を固定した場合の効果
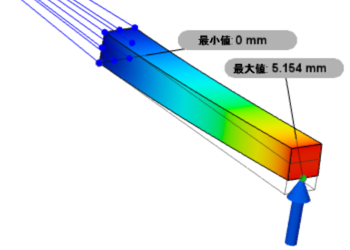 |
(a) 梁の一方の端点にリモート拘束を適用し、6 つの自由度(Ux、Uy、Uz、Rx、Ry、Rz)をすべて固定した場合、もう一方の端点に荷重を適用すると、固定拘束のように動作します。リモート拘束は、剛体リンクを使用してノード(剛体とみなす)を面に固定します。ノードがまったく変位または回転しない場合、事実上完全な剛体接続になります。 |
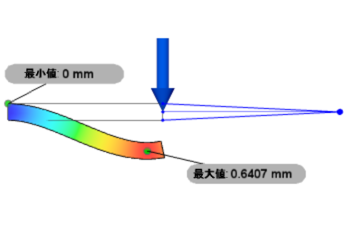 |
(b) この例では、梁の一方の端点に固定拘束が適用されています。もう一方の端点にリモート拘束を適用し、移動自由度(Ux、Uy、Uz)のみを固定する場合、梁の終端面に荷重を適用すると、梁の先端では変位と回転の両方が可能になります。面が回転し、必ずリモート拘束の位置を指していることに注目してください。 |
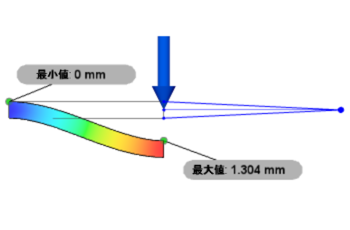 |
(c) 代わりに、回転自由度 Rx、Ry、Rz のみを固定して、梁の終端面に荷重を適用すると、移動自由度のみが固定されている場合よりも先端の変位が大幅に大きくなります。この場合、面は常に垂直のままであることに注目してください。 |
図 1: (a) 6 つの自由度がすべて固定されているリモート拘束、(b) 並進自由度が固定されているリモート拘束、(c) 回転自由度が固定されているリモート拘束、を使用した変位の結果。
リモート拘束の既定の設定では完全に拘束されており、固定拘束の適用に似ています。