| Dostęp: |
W oknie dialogowym Wstaw połączenie kliknij ikonę Wyświetl tabelę połączeń. |
Kliknij obrazy w górnej części okna dialogowego, aby przejść z jednej kategorii połączeń do innej.
Połączenia standardowe
Połączenia standardowe są najczęściej używanymi połączeniami. Te połączenia są oparte na różnych kombinacjach stopni swobody ruchu obrotowego i przesuwnego. W tej kategorii dostępne są następujące połączenia:
![]() Obrót
Obrót
![]() Pryzmatyczne
Pryzmatyczne
![]() Walcowe
Walcowe
![]() Sferyczne
Sferyczne
![]() Płaskie
Płaskie
![]() Punkt-linia
Punkt-linia
![]() Linia-płaszczyzna
Linia-płaszczyzna
![]() Punkt-płaszczyzna
Punkt-płaszczyzna
![]() Przestrzenne
Przestrzenne
![]() Spawane
Spawane
Połączenia toczne
Mimo że obrazy wskazują, że połączenia mogą być wykorzystywane do symulowania mechanizmów przekładniowych, rzeczywista siatka zębów przekładni nie jest brana pod uwagę. Używając tej metody, współczynnik ustalany jest w oparciu o geometrię wybraną na efektywnym promieniu toczonym koła zębatego.
![]() Toczne: walec na płaszczyźnie
Toczne: walec na płaszczyźnie
![]() Toczne: walec na walcu
Toczne: walec na walcu
![]() Toczne: walec w walcu
Toczne: walec w walcu
![]() Toczne: krzywa walca
Toczne: krzywa walca
![]() Pas
Pas
![]() Toczne: stożek na płaszczyźnie
Toczne: stożek na płaszczyźnie
![]() Toczne: stożek na stożku
Toczne: stożek na stożku
![]() Toczne: stożek w stożku
Toczne: stożek w stożku
![]() Śruba
Śruba
![]() Przekładnia ślimakowa
Przekładnia ślimakowa
Połączenia ślizgowe
![]() Przesuwne: walec na płaszczyźnie
Przesuwne: walec na płaszczyźnie
![]() Przesuwne: walec na walcu
Przesuwne: walec na walcu
![]() Przesuwne: walec w walcu
Przesuwne: walec w walcu
![]() Przesuwne: krzywa walca
Przesuwne: krzywa walca
![]() Przesuwne: krzywa punktu
Przesuwne: krzywa punktu
Połączenia kontaktowe
Połączenie kontaktowe 2D jest precyzyjne. Wykrywa mające miejsce kolizje, ale umożliwia również oddzielenie. Ponieważ powierzchnie nie posiadają płaszczyzn i nie ulegają penetracji, istnieje mniejsze ryzyko wystąpienia anomalii w wynikach. Pracując nad takimi mechanizmami, jak krzywki i popychacze, należy używać tych połączeń, zamiast połączeń kontaktowych 3D, aby precyzyjnie zbadać zachowanie mechanizmu. W niektórych przypadkach należy utworzyć dodatkową geometrię części lub użyć wielu połączeń kontaktowych 2D, aby osiągnąć wymagane rezultaty.
![]() Złącze kontaktowe 2D
Złącze kontaktowe 2D
Modyfikacja geometrii w celu zapewnienia ciągłej, „wygładzonej” pętli.
W celu zapewnienia wygładzonej, ciągłej pętli dla algorytmu złącza kontaktowego 2D (aby usprawnić obliczenia), wykonywana jest drobna zmiana geometrii. Brak ciągłości w profilu jest wygładzany w celu uzyskania pętli ciągłej, co umożliwia szybkie programowe rozwiązanie kontaktu. W poniższym przykładzie zilustrowano procesy przebiegające w programie.
 |
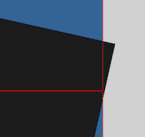
W przykładzie rozważany jest blok z powierzchniami płaskimi stykający się z innym komponentem, którego nie wszystkie powierzchnie są nierównoległe do powierzchni bloku. Z pewnej odległości wektory kontaktu (czerwone) wyglądają tak jak powinny. |
 |
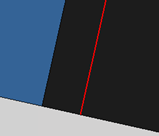
Jeśli powiększymy powierzchnię kontaktu powierzchni nierównoległych, można zauważyć, że stykające się powierzchnie nieznacznie na siebie zachodzą. |
 |
Po powiększeniu powierzchni kontaktu powierzchni równoległej, można zauważyć to, co przedstawiono na ilustracji po lewej stronie. |
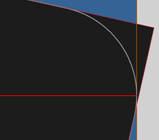 |
Taka sytuacja występuje, ponieważ w symulacji dynamicznej automatycznie tworzone są zaokrąglenia gładkich narożników, tak jak pokazano na ilustracji po lewej stronie. Jak można zauważyć, kontakt jest dokładny z uwzględnieniem zaokrąglenia. |
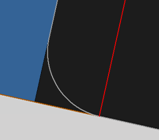 |
W przypadku połączenia z równoległymi powierzchniami, kontakt jest również dokładny z uwzględnieniem zaokrąglenia. |
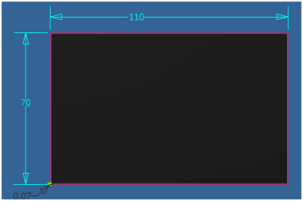 |
Zaokrąglenie jest tworzone w programie za pomocą następującej metody:
Jeśli zostanie osiągnięta minimalna wartość 5e-6 mm, wierzchołek nie jest wygładzany. W przykładzie po lewej stronie Lmin = 70 mm a kąt jest prosty (90 st), zatem długość promienia wynosi 0,07 mm. |
Połączenia wymuszone
![]() Kontaktowe 3D
Kontaktowe 3D
![]() Sprężyna/amortyzator/dźwignia
Sprężyna/amortyzator/dźwignia
| Typ | Parametry | Wyświetlanie | Komentarze |
|---|---|---|---|
| Sprężyna spiralna | Sztywność, długość swobodna, tłumienie | Sprężyna spiralna | Typ domyślny. Siła zależy od odległości pomiędzy dwoma punktami (sztywności i długości swobodnej) oraz prędkości pomiędzy nimi (tłumienia). |
| Sprężyna | Sztywność, długość swobodna, tłumienie | rozdzielone, piętrowe walce | Takie samo działanie jak w przypadku sprężyny spiralnej. Wyświetlana zawartość przypomina podkładkę talerzową, a czas wyświetlania jest optymalizowany. |
| Amortyzator sprężynowy | Sztywność, długość swobodna, tłumienie | Sprężyna spiralna i amortyzator | Takie samo działanie jak w przypadku sprężyny spiralnej. Wyświetlana zawartość jest podobna do amortyzatora samochodowego. |
| Amortyzator | Tłumienie | Amortyzator | Tylko tłumienie. Siła zależy od prędkości pomiędzy dwoma punktami. |
| Dźwignia | Grapher wejściowy lub stała | Amortyzator | Umożliwia zastosowanie parametru siły bezpośrednio do modelu. Na ilustracji przedstawiono mechanizm dźwigniowy. |