| Acesso: |
Na caixa de diálogo Inserir junta, clique no ícone Exibir tabela de juntas. |
Clique nas imagens da seção superior da caixa de diálogo para passar de uma categoria de junta à outra.
Juntas padrão
As juntas padrões são as mais usadas. Estas juntas são baseadas em diferentes combinações de graus de liberdade de rotação e translação. As juntas disponíveis nesta categoria são as seguintes:
![]() Revolução
Revolução
![]() Prismática
Prismática
![]() Cilíndrica
Cilíndrica
![]() Esférica
Esférica
![]() Plana
Plana
![]() Ponto-linha
Ponto-linha
![]() Linha-Plano
Linha-Plano
![]() Ponto-Plano
Ponto-Plano
![]() Espacial
Espacial
![]() Solda
Solda
Juntas giratórias
Embora as imagens indicam que as juntas podem ser utilizadas para simular mecanismos de engrenagem, a malha real dos dentes da engrenagem não levada em consideração. O método estabelece um raio baseado na geometria selecionada para o raio giratório efetivo das engrenagens.
![]() Giratória: Cilindro sobre Plano
Giratória: Cilindro sobre Plano
![]() Giratória: Cilindro sobre Cilindro
Giratória: Cilindro sobre Cilindro
![]() Giratória: Cilindro em Cilindro
Giratória: Cilindro em Cilindro
![]() Giratória: Curva de cilindro
Giratória: Curva de cilindro
![]() Correia
Correia
![]() Giratória: Cone sobre Plano
Giratória: Cone sobre Plano
![]() Giratória: Cone sobre Cone
Giratória: Cone sobre Cone
![]() Giratória: Cone em Cone
Giratória: Cone em Cone
![]() Parafuso
Parafuso
![]() Engrenagem sem-fim
Engrenagem sem-fim
Juntas deslizantes
![]() Deslizante: Cilindro sobre Plano
Deslizante: Cilindro sobre Plano
![]() Deslizante: Cilindro sobre Cilindro
Deslizante: Cilindro sobre Cilindro
![]() Deslizante: Cilindro em Cilindro
Deslizante: Cilindro em Cilindro
![]() Deslizante: Curva de cilindro
Deslizante: Curva de cilindro
![]() Deslizante: Curva de ponto
Deslizante: Curva de ponto
Junta de contato
A junta de contato 2D é muito precisa. Detecta quando ocorre uma colisão e ao mesmo tempo, permite a separação. Como as superfícies não têm facetas e não são penetradas, é menos provável que ocorram anomalias nos resultados. Se trabalha com mecanismos como câmeras e seguidores, use estas juntas, ao invés das juntas de contato 3D, para pesquisar com exatidão o funcionamento do mecanismo. Em certos casos, deverá criar geometria adicional sobre uma peça ou usar várias juntas 2D para obter o resultado desejado.
![]() Contato 2D
Contato 2D
Modificação da geometria para garantir um contorno "suave" sem interrupções.
A fim de oferecer um contorno suave sem interrupções no algoritmo de contato 2D (para melhorar o cálculo), são executadas pequenas modificações na geometria. Qualquer discontinuidade do perfil é suavizada para permitir um contorno contínuo, que habilita o software a resolver o contato rapidamente. O exemplo seguinte ilustra o que ocorre no software.
 |
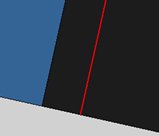
O exemplo é um bloco, com faces planas, em contato com outro componente onde algumas faces são paralelas às faces do bloco. A primeira vista, parece que os vetores do contato (em vermelho) têm o aspecto esperado. |
 |
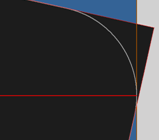
Se ampliarmos a área do contato nas faces não paralelas, perceberemos que há certa sobreposição no contato. |
 |
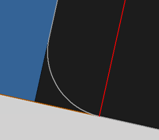
Ampliando a área de contato da face paralela, vemos o que é mostrado à esquerda. |
 |
Isto acontece porque a simulação dinâmica cria automaticamente concordâncias ou vértices suaves, tal como são exibidos na imagem à esquerda. Como é possível notar, o contato tem uma precisão exata em relação ao arredondamento. |
 |
No caso da junta com faces paralelas, o contato também tem uma precisão exata com relação ao arredondamento. |
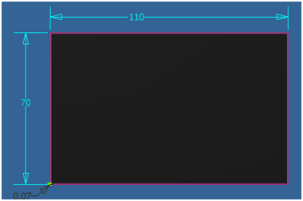 |
O software cria o arredondamento seguindo o seguinte método:
Se é atingido o valor mínimo de 5e-6 mm, o vértice não é suavizado. No exemplo da esquerda, Lmin = 70 mm e o ângulo é perpendicular (90 graus), portanto o raio é 0,07 mm. |
Juntas de força
![]() Contato 3D
Contato 3D
![]() Mola/amortecedor/conector
Mola/amortecedor/conector
| Tipo | Parâmetros | Exibição | Comentários |
|---|---|---|---|
| Mola helicoidal | Rigidez, Comprimento livre, Amortecimento | Mola helicoidal | Tipo padrão. A força depende da distância entre os 2 pontos (rigidez e comprimento livre) e da velocidade entre eles (amortecimento). |
| Mola | Rigidez, Comprimento livre, Amortecimento | cilindros separados, empilhados | A mesma ação que na Mola helicoidal. A visualização é de alguma forma assemelhada às arruelas Mola prato e melhora o tempo de visualização. |
| Amortecedor de mola | Rigidez, Comprimento livre, Amortecimento | Mola helicoidal e amortecedor | A mesma ação que na Mola helicoidal. A visualização é similar a um amortecedor de impactos de um automóvel. |
| Amortecedor | Amortecendo | Amortecedor | Só uma ação de amortecimento. A força depende da velocidade entre os dois pontos. |
| Conector | Gráfico de entrada ou Constante | Amortecedor | Aplica o parâmetro da força diretamente ao modelo. O gráfico exibe um mecanismo do tipo conector. |