
-
Barre d'outils MassFX > icône déroulante Outils MassFX > Choisissez (Paramètres d'univers).
Remarque : Paramètres d'univers est le bouton actif par défaut de l'icône déroulante Outils MassFX.
-
Menu standard : menu Animation > MassFX > Utilitaires > Afficher les outils MassFX > boîte de dialogue Outils MassFX > Cliquez sur (Paramètres d'univers).
-
Menu amélioré : menu Simuler > Outils - MassFX > Afficher les outils MassFX > boîte de dialogue Outils MassFX > Cliquez sur (Paramètres d'univers)
Interface
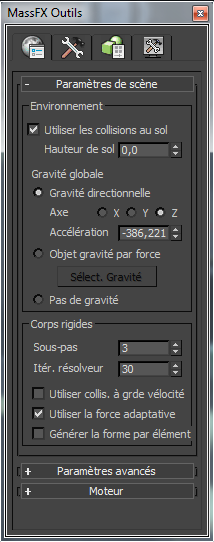
Panneau déroulant Paramètres de la scène
Groupe Environnement
Ces paramètres vous permettent de contrôler les collisions au sol et la gravité. Pour simuler la gravité, vous pouvez utiliser la force incluse avec MassFX ou la déformation spatiale Gravité dans 3ds Max. Vous pouvez aussi choisir de ne pas utiliser la gravité.
- Utiliser les collisions au sol
- Lorsque cette option est activée, MassFX utilise un corps rigide statique, planaire, infini (invisible) au niveau Hauteur de sol, autrement dit parallèle à la grille origine ou coplanaire avec cette dernière. Ce corps dispose de valeurs fixes pour les frictions et les rebonds. Cette option est activée par défaut. Conseil : Utilisez le plan de sol en tant que test pratique pour votre simulation.
- Hauteur de sol
- Hauteur du corps rigide du sol lorsque l'option Utiliser les collisions au sol est activée. Spécifiée dans les unités actives.
- Gravité globale
- Ces paramètres s'appliquent aux corps rigides pour lesquels le paramètre Utiliser la gravité de l'univers est activé et aux objets mCloth pour lesquels l'option Utiliser gravité globale est activée.
- Gravité directionnelleApplique la force gravitationnelle intégrée dans MassFX. Vous pouvez ajuster cette force avec les paramètres suivants :
- Axe Axe global le long duquel la gravité (voir Accélération ci-après) est appliquée. Pour la gravité standard haut/bas, définissez Axe sur Z ; c'est la valeur par défaut.
- AccélérationForce de gravité, spécifiée en unités par seconde par seconde. En utilisant l'axe Z, les valeurs positives font que la gravité tirent les objets vers le haut, tandis que les valeurs négatives tirent les objets vers le bas (il s'agit de l'effet standard).
A des fins de référence, la gravité terrestre est d'environ -981.001 cm/s2 = -386.221 po/s2 = -32.185 pi/s2 = -9.81 m/s2
- Objet gravité par force Vous pouvez utiliser une déformation spatiale Gravité pour appliquer la gravité aux corps rigides. Commencez par ajouter une déformation spatiale à la scène, puis cliquez sur le bouton Sélect. Gravité pour qu'elle soit désignée comme utilisable dans la simulation.
Cette option utilise la même échelle que la gravité MassFX, mais avec des valeurs positives plutôt que négatives. Ainsi, pour obtenir une gravité réaliste, définissez l'intensité de la déformation spatiale sur 386.221 si l'option Echelle d'unités système est définie sur 1.0 pouce. Pour les autres unités système, reportez-vous à la rubrique Accélération ci-dessus.
Cette option a pour principal avantage de permettre d'appliquer la gravité dans n'importe quelle direction en faisant pivoter l'objet déformation spatiale. L'option Déclin n'a aucun effet et la gravité utilise toujours l'option Planaire ; le fait de la définir sur Sphérique n'a aucun effet.
Conseil : Vous pouvez appliquer différents paramètres de gravité à des objets individuels à l'aide des paramètres du panneau déroulant Paramètres. - Pas de gravitéLorsque cette option est sélectionnée, la gravité n'a aucune incidence sur la simulation.
- Gravité directionnelleApplique la force gravitationnelle intégrée dans MassFX. Vous pouvez ajuster cette force avec les paramètres suivants :
Zone corps rigides
Si les collisions et les contraintes semblent ne pas fonctionner correctement dans la simulation, essayez de régler ces paramètres.
- Sous-pas
- Le nombre de pas de simulation effectuée entre chaque mise à jour graphique est déterminée par la formule suivante: (Sous-pas + 1) * Image/sec. Une fréquence d'images de 30 is avec 0 sous-pas donne un résultat de 30 pas de simulation par seconde. 1 sous-pas donne un résultat de 60 pas de simulation par seconde, 2 sous-pas donnent un résultat de 180 pas de simulation par seconde etc. La valeur maximale des sous-pas est de 159, ce qui donne un résultat de 4 800 pas de simulation par secondes d'animation à 30 is. L'utilisation d'une valeur sous-pas plus élevée génère une plus grande précision dans les résultats de collision et de contraintes, au détriment du niveau de performance, bien entendu.
- Itér[ations] résolveur
- Paramètre global pour le nombre de fois où le résolveur de contrainte force les collisions et les contraintes. Des valeurs plus élevées peuvent être nécessaires lorsque la simulation utilise de nombreuses contraintes, ou lorsque la tolérance pour les erreurs de connexion est très faible. Les valeurs supérieures à 30 sont généralement inutiles.
- Utiliser les collisions à grande vélocité
- Paramètre global de basculement de détection continue de collision.
Lorsque les corps rigides se déplacent tellement vite qu'ils voyagent à une grande distance entre deux images de simulation, il se peut qu'ils se traversent mutuellement. Par exemple, une boule de bowling se déplaçant rapidement dans une animation qui utilise une faible fréquence d'images peut se trouver d'un certain côté d'une accroche dans une image donnée et se retrouver de l'autre côté de l'accroche dans l'image suivante. Dans un tel cas, la collision entre la boule et l'accroche n'a pas lieu.
Ce problème peut être résolu en augmentant le nombre d'images par seconde et/ou de sous-pas de la simulation. Toutefois, ces paramètres s'appliquent de façon globale; les augmenter de façon suffisante pour corriger un objet qui se déplace rapidement risque de réduire les performances de la simulation dans son ensemble. Lorsque l'option Utiliser les collisions à grande vélocité est activée, MassFX recherche tout les corps rigides se déplaçant rapidement et crée une forme de collision simplifiée qui s'étend sur la position entre l'image précédente et l'image actuelle. Par exemple, la boule de bowling peut posséder une capsule s'étirant d'un côté à l'autre de l'accroche; parce que la capsule chevauche l'accroche, MassFX détecte la collision.
Par défaut, MassFX définit de façon heuristique (c'est-à-dire en fonction des données recueillies lors des expériences antérieures) le seuil de la vitesse au-dessus duquel appliquer la fonction Utiliser les collisions à grande vélocité pour les corps rigides. Pour spécifier une valeur personnalisée, utilisez le paramètre Collisions à grande vélocité
 Vitesse Min. Remarque : Ce mode s'applique uniquement à un jeu limité de circonstances de collisions. L'option Utiliser les collisions à grande vélocité doit également être activée pour un corps rigide dynamique qui doit entrer en collision avec un corps rigide statique utilisant une coque convexe pour la forme physique, et dont la vitesse de déplacement doit être supérieure au seuil de vitesse minimum.
Vitesse Min. Remarque : Ce mode s'applique uniquement à un jeu limité de circonstances de collisions. L'option Utiliser les collisions à grande vélocité doit également être activée pour un corps rigide dynamique qui doit entrer en collision avec un corps rigide statique utilisant une coque convexe pour la forme physique, et dont la vitesse de déplacement doit être supérieure au seuil de vitesse minimum. - Utiliser la force adaptative
- Lorsque cette option est activée, MassFX réduit le bruit dans les corps rigides empilés et regroupés de façon serrée en diminuant les forces de dépénétration combinées selon les besoins.
- Générer la forme par élément
- Lorsque cette option est activée et que vous appliquez le modificateur corps rigide MassFX à un objet, MassFX crée une forme physique séparée pour chaque élément de l'objet. Lorsque cette option est désactivée, MassFX crée une seule forme physique pour tout l'objet. Cette dernière option est moins précise, mais permet d'effectuer une simulation plus rapidement.
Par exemple, la primitive Théière dans 3ds Max se compose de quatre éléments : Corps, Poignée, Bec et Couvercle. L'illustration suivante compare les formes physiques générées pour la théière lorsque le paramètre Générer la forme par élément est activé et désactivé. La version située à gauche, avec quatre formes physiques, comporte encore des zones concaves "obstruées", telles que l'intérieur de la poignée, mais elle est plus proche de la forme réelle de la théière.
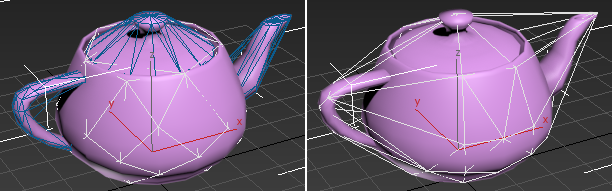
Gauche : option Générer forme par élément activée
Droite : option Générer forme par élément désactivée
Remarque : Ce basculement s'applique uniquement aux corps rigides créés par la suite. Vous ne pouvez pas basculer un modificateur corps rigide entre les modes forme unique et forme par élément.
Panneau déroulant Paramètres avancés
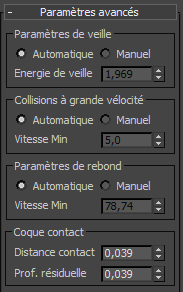
Zone Paramètres de veille
- [méthode veille]
- Les corps rigides de la simulation qui se déplacent à une vitesse inférieure à ce qui a été défini passent automatiquement en mode "veille", puis s'arrêtent. Cela permet d'améliorer les performances en laissant MassFX traiter d'autres objets, plus actifs. Un objet en veille "se réveille" et recommence à bouger s'il est heurté par un autre corps rigide actif. Choisissez la façon dont MassFX détermine si un corps est en veille :
- AutomatiqueMassFX calcule automatiquement la valeur raisonnable du seuil de mise en veille au-dessus duquel cette dernière sera appliquée, aussi bien pour les vélocités linéaires que pour les vélocités angulaires. Pour ce faire, MassFX utilise une méthode heuristique (c'est à dire basée sur des expériences antérieures).
- ManuelPour remplacer les valeurs heuristiques de vitesse et de rotation, sélectionnez Manuel et ajustez les paramètres suivants selon vos besoins :
- Energie de veille
- Le mécanisme de veille mesure le degré de mouvement d'un objet (combinaison de conversion et de rotation), et place l'objet en mode veille lorsque son mouvement passe sous le seuil défini pour Energie de veille. Le seuil est indépendant de la masse.
Zone de collisions à grande vélocité
- [méthode de collision à grande vélocité]
- Lorsque l'option Utiliser les collisions à grande vélocité est activée, ces paramètres déterminent la manière dont MassFX calcule de telles collisions. Choisissez une méthode :
- AutomatiqueMassFX utilise un algorithme heuristique pour calculer la valeur raisonnable du seuil de vitesse au-dessus duquel la méthode de collision à grande vélocité est appliquée.
- ManuelPour remplacer la valeur automatique de la vitesse, sélectionnez Manuel et définissez la valeur Vitesse min. souhaitée :
- Vitesse Min
- Les corps rigides se déplaçant à une vitesse supérieure à celle spécifiée (en unités/seconde) dans la simulation entrent automatiquement en mode Collision à grande vélocité. La définition d'une valeur trop élevée peut provoquer un déplacement trop rapide de l'objet, qui risque alors de traverser les autres objets avec lesquels il doit normalement entrer en collision. La définition d'une valeur trop faible provoque le passage d'un nombre plus élevé d'objets en mode Collisions à grande vélocité, ce qui risque de réduire les performances étant donné que des opérations supplémentaires sont alors requises pour calculer la collision des objets se déplaçant lentement. Définir cette valeur sur 0,0 active le mode Collision à grande vélocité pour tous les objets. Pour que ces paramètres soient appliqués, l'option Utiliser les collisions à grande vélocité doit être activée.
Zone Paramètres de rebond
- [méthode de rebond]
- Choisissez une méthode pour déterminer les cas où les corps rigides doivent rebondir les uns sur les autres :
- AutomatiqueMassFX utilise un algorithme heuristique pour calculer la valeur raisonnable du seuil de vitesse au-dessus duquel appliquer le rebond.
- ManuelPour remplacer la valeur automatique de la vitesse, sélectionnez Manuel et définissez la valeur Vitesse min. souhaitée :
- Vitesse Min
- Les corps rigides se déplaçant à une vitesse supérieure à celle spécifiée (en unités/seconde) dans la simulation vont rebondir les uns sur les autres dans le cadre de la collision. Définir une valeur trop élevée peut provoquer un déplacement trop rapide des objets qui risquent alors de ne pas rebondir lors de la collision avec d'autres objets. Définir une valeur trop faible provoquera le rebondissement d'un nombre plus élevé d'objets dans la scène, ce qui risque de réduire les performances de la simulation et de générer éventuellement du bruit. Définir cette valeur sur 0,0 active le rebond pour tous les objets.
Groupe Coque contact
Utilisez ces paramètres pour déterminer le volume environnant dans lequel MassFX détecte des collisions entre les corps dans la simulation.
- Distance contact
- Distance sur laquelle le chevauchement des corps rigides est autorisé.
Une valeur trop élevée peut provoquer une interpénétration visible des objets. Une valeur définie trop faible peut entraîner la présence de bruit, car les objets interpénètrent une image tout en étant alternativement forcés sur une séparation.
Le meilleur choix de valeur dépend de plusieurs facteurs, comme par exemple la taille des objets dans la scène, la proximité de la caméra pour de possibles interpénétrations, les paramètres d'accélération de la gravité, les itérations du résolveur, la quantité d'inflation des formes physiques et la fréquence d'images de la simulation.
- Profondeur résiduelle
- Distance sur laquelle le chevauchement des corps au repos est autorisé. Ce paramètre peut entrer en ligne de compte lorsque vous utilisez la capture des transformations pour définir des corps à leur position initiale dans la simulation. Remarque : Lorsque vous modifiez la valeur Distance contact, la valeur Profondeur résiduelle prend automatiquement la même valeur, à laquelle est ajoutée la différence entre les deux. Par exemple, supposons que la valeur Distance contact est définie sur 10.0 et que Profondeur résiduelle est égale à 8.0 (différence =-2.0). Si vous définissez ensuite Distance contact sur 6.5, la valeur Profondeur résiduelle devient automatiquement 4.5 (6.5 + (-2.0)). Cependant, la modification de la valeur Profondeur résiduelle n'a pas d'incidence sur le paramètre Distance contact.
Panneau déroulant Moteur
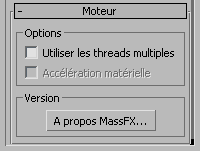
Ces options permettent d'accélérer la simulation si vous disposez du matériel nécessaire.
- Utiliser les threads multiples
- Lorsque cette option est activée et si votre processeur contient plusieurs noyaux, celui-ci peut exécuter plusieurs filetages pour accélérer le calcul de la simulation. Cette opération peut améliorer les performances dans certains cas. Toutefois, les résultats entre des simulations successives peuvent varier.
- Accélération matérielle
- Lorsque cette option est activée et si votre système est équipé d'une carte graphique GPU nVidia, votre système peut utiliser l'accélération matérielle pour effectuer certains calculs. Cette opération peut améliorer les performances dans certains cas. Toutefois, les résultats entre des simulations successives peuvent varier.
- A propos de MassFX
- Ouvre une petite boîte de dialogue affichant des informations de base sur MassFX, notamment la version PhysX.