Le modificateur Corps rigide MassFX doit être appliqué à un objet géométrique destiné à être inclu dans une simulation physique. (Vous pouvez également utiliser le modificateur mCloth.) La méthode la plus simple pour convertir un objet en un corps rigide consiste à sélectionner l'objet, puis à choisir le type de corps rigide à partir de l'icône déroulante de la barre d'outils MassFX.
-
Sélectionnez un ou plusieurs objets géométriques. >
 Groupe de fonctions Modifier > Liste des modificateurs > Modificateurs espace objets > MassFX RBody
Groupe de fonctions Modifier > Liste des modificateurs > Modificateurs espace objets > MassFX RBody
- .
L'interface du modificateur se compose de plusieurs panneaux déroulants situés sur le groupe de fonctions Modifier, ainsi que d'une pile de modificateurs comprenant quatre niveaux de sous-objet. La plupart des commandes de ce panneau déroulant ne sont disponibles que pour les corps rigides non ancrés et deviennent disponibles une fois que vous avez ancré le mouvement d'un objet. Pour restaurer les commandes, cliquez sur le bouton Désancrer, situé sur le panneau déroulant Propriétés corps rigides.
Interface
Pile des modificateurs : niveaux sous-objet
La pile des modificateurs des corps rigides permet d'accéder à la visualisation d'un certain nombre de paramètres ayant une incidence sur la simulation. Lorsqu'un niveau de sous-objet est actif, vous pouvez modifier la manière dont la simulation démarre, puis transformer le gizmo correspondant.
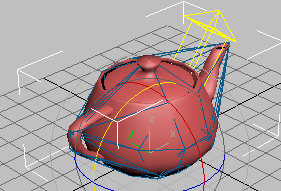
- Vélocité initiale
- Ce niveau affiche un aperçu de la direction de la Vélocité initiale pour le corps rigide. Utilisez l'outil Rotation pour changer la direction.
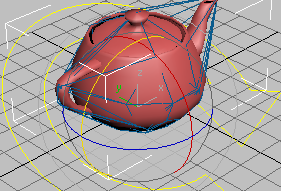
- Révolution initiale
-
Ce niveau affiche un aperçu de l'axe et de la direction de la révolution initiale pour le corps rigide. Utilisez l'outil Rotation pour modifier l'axe.
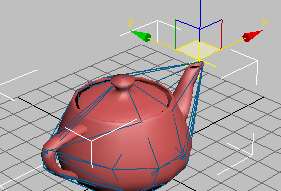
- Centre de gravité
-
Ce niveau affiche un aperçu de l'emplacement du centre de gravité pour le corps rigide. Utilisez l'outil Déplacement pour changer l'emplacement.
- Transformer maillage
-
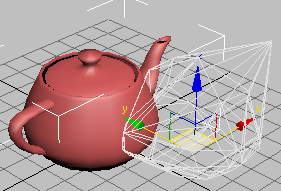
Ce niveau vous permet de régler la position et la rotation d'une forme physique pour le corps rigide. Mettez en surbrillance la forme physique à transformer dans la liste du panneau déroulant Formes physiques ; la forme physique est alors représentée sous la forme d'un modèle filaire blanc dans les fenêtres. Utilisez les outils Déplacer et Rotation pour ajuster la position relative de la forme physique par rapport au corps rigide.
Panneau déroulant Propriétés corps rigide
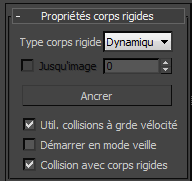
- Type de corps rigides
- Type de simulation pour tous les corps rigides sélectionnés. Les choix disponibles sont les suivants : Dynamique, Cinématique et Statique. Pour plus de détails, reportez-vous à la rubrique Types de corps rigides : Dynamique, Statique et Cinématique.
- Jusqu'image
- Lorsque cette option est activée, MassFX convertit le corps cinématique sélectionné en un corps dynamique au niveau de l'image spécifiée. Cette option est disponible uniquement lorsque le type de corps rigide est défini sur Cinématique.
Cela signifie que vous pouvez animer un objet à l'aide de méthodes standard et définir le type de corps rigide sur Cinématique, de sorte qu'il se comporte comme un objet animé jusqu'à l'image voulue. Le corps rigide devient à ce moment un objet dynamique et il est par conséquent soumis aux forces de la simulation MassFX dans leur ensemble.
Par exemple, pour recréer un match de baseball, vous pouvez animer la balle de telle façon qu'elle quitte la main du lanceur et s'élève en direction de la batte. Ensuite, à l'aide de l'option Jusqu'image, MassFX prend la relève lorsque la batte frappe la balle et simule de façon précise l'action du batteur démarrant un tour de terrain (ou commettant une faute).
Conseil : Un corps rigide n'a pas besoin d'être animé pour tirer parti de cette fonction. Vous pouvez par exemple suspendre plusieurs corps fixes et les placer à différents moments. Pour ce faire, il vous suffit de tous les définir en tant que corps cinématiques et d'activer l'option Jusqu'à image, puis de les sélectionner à tour de rôle et de spécifier l'image à partir de laquelle ils doivent commencer à être soumis à la gravité et/ou à d'autres forces. - Ancrer / Désancrer
- Convertit les mouvements simulés du corps rigide en images clés d'animation standard pour le rendu. S'applique uniquement aux corps rigides dynamiques.
Si le corps rigide est ancré, l'étiquette du bouton indique "Désancrer". Si vous cliquez dessus, vous supprimez les images clés et restaurez l'état Dynamique des corps.
- Utiliser les collisions à grande vélocité
- Lorsque cette option et l'interrupteur du groupe de fonctions universel
 Utiliser les collisions à grande vélocité sont activés, les paramètres de collisions à grande vélocité s'appliquent au corps rigide sélectionné.
Utiliser les collisions à grande vélocité sont activés, les paramètres de collisions à grande vélocité s'appliquent au corps rigide sélectionné. - Démarrer en mode veille
- Lorsque cette option est activée, le corps rigide démarre la simulation en mode veille à l'aide des paramètres globaux de veille. Cela signifie qu'il reste immobile jusqu'à ce qu'un autre corps rigide actif ne le touche. Par exemple, pour simuler un rallye de dominos, démarrez tous les dominos en mode veille à l'exception du premier.
- Collision avec corps rigides
- Lorsque cette option est activée (par défaut), les corps rigides sélectionnés entrent en collision avec d'autres corps rigides de la scène.
Panneau déroulant Matériau physique
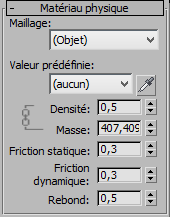
Les propriétés du matériau physique contrôlent la façon dont les corps rigides interagissent avec d'autres éléments de la simulation : leur masse, leur friction, leur rebond, etc. Pour simuler des substances matérielles comme le carton ou le caoutchouc, vous pouvez définir les propriétés du matériau une par une ou utiliser une valeur prédéfinie.
- Maille
- Utilisez la liste déroulante pour sélectionner la forme physique du corps rigide pour lequel vous souhaitez modifier les paramètres de matériau. Toutes les formes physiques utilisent par défaut le paramètre de matériau commun intitulé "(Objet)". Seules les formes physiques pour lesquelles la case Remplacer matériau physique est cochée apparaissent dans cette liste.
- Prédéfini
- Choisissez une valeur prédéfinie dans la liste pour spécifier toutes les propriétés du matériau physique. (La masse du corps rigide est recalculée en fonction de la valeur de la densité et du volume de l'objet). Lorsqu'une valeur prédéfinie est sélectionnée, les paramètres ne sont pas modifiables, mais lorsque la valeur prédéfinie est définie sur (Aucun), vous pouvez modifier les valeurs de votre choix.
Pour utiliser les paramètres d'un autre corps rigide dans la scène, cliquez sur
 puis sélectionnez un corps rigide dans la scène.
puis sélectionnez un corps rigide dans la scène. Des commandes destinées à charger et enregistrer une valeur prédéfinie en tant que fichier et permettant de créer une nouvelle valeur prédéfinie se trouvent au bas de la liste.
- Densité
- La densité du corps rigide est exprimée en g/cm3 (grammes par centimètre cube). Ceci représente un millième de la mesure équivalente exprimée en unités internationales SI : kg/m3. La modification de cette valeur calcule automatiquement la masse correcte de l'objet en fonction de son volume.
- Masse
- Poids du corps rigide, exprimé en kg (kilogrammes). La modification de cette valeur met automatiquement à jour la densité de l'objet en fonction de son volume.
- Friction statique
- Degré de difficulté de deux corps rigides à amorcer un glissement l'un par rapport à l'autre. Une valeur de 0,0 indique une absence de friction (valeur plus glissante que celle du téflon); une valeur de 1,0 indique une friction totale (colle caoutchouc sur papier de verre).
La friction statique effective entre deux corps rigides est le produit de leurs valeurs de friction statique. Si un corps rigide possède une valeur de friction statique de 0,0, le type de valeur de l'autre corps rigide n'a pas d'importance. (Tout glisse sur de la glace mouillée, même le papier de verre). Lorsque les deux objets commencent à glisser l'un contre l'autre, la friction dynamique (voir ci-dessous) s'applique à la place.
- Friction dynamique
- Degré de difficulté de deux corps rigides à assurer la continuité d'un glissement l'un par rapport à l'autre. Techniquement, ce paramètre est appelé "coefficient de friction cinématique". Une valeur de 0,0 indique une absence de friction (valeur plus glissante que celle du téflon); une valeur de 1,0 indique une friction totale (caoutchouc, ciment ou papier de verre).
Dans le monde réel, cette valeur doit être inférieure au coefficient de friction statique. (il est plus difficile de commencer à pousser un canapé sur le sol que d'assurer la continuité de son déplacement.) Comme pour la friction statique, la valeur effective entre deux corps rigides est le produit de leurs valeurs respectives.
- Rebond
- Comment faire rebondir un objet facilement lorsqu'il rencontre un autre corps rigide et augmenter la hauteur de ce rebond. Techniquement, ce paramètre est appelé "coefficient de restitution". Une valeur de 0,0 indique l'absence de rebond (comme du beurre de cacahuète tombant sur un tapis); une valeur de 1,0 indique que l'intensité du rebond de l'objet est approximativement égale à la force avec laquelle l'objet a été frappé. Le rebond effectif entre deux corps rigides est le produit de leurs valeurs de rebond. Une balle de caoutchouc ayant des propriétés rebondissantes importantes ne rebondit pas sur du beurre de cacahuète.
Panneau déroulant Formes physiques
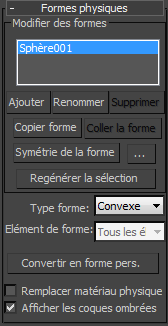
Ce panneau permet de modifier les formes physiques affectées à un objet dans la simulation. Vous pouvez utiliser les commandes pour ajouter et supprimer des formes physiques, modifier le type de forme, copier des formes physiques entre les objets, etc. Lorsque vous exécutez la simulation, MassFX utilise toutes les formes physiques affectées pour représenter la présence physique de l'objet. Pour plus d'informations, reportez-vous à la rubrique Présentation des corps rigides.
Groupe Modifier des formes
- Liste des formes
- Affiche toutes les formes physiques constituant le corps rigide. Sélectionnez une forme physique dans la liste afin de la renommer, de la supprimer, de la copier et la coller, de changer ses paramètres de maillage ou de modifier sa transformation via le niveau de sous-objet Transformer maillage.
- Ajouter
- Applique une nouvelle forme physique au corps rigide. Par défaut, la nouvelle forme est convexe et couvre la totalité du maillage graphique, de même que lors de la première application du modificateur Corps rigide MassFX à un objet. Lorsque vous ajoutez une forme, celle-ci est mise en surbrillance dans la liste afin que vous puissiez modifier le type, les propriétés, etc.
- Renommer
-
Permet de modifier le nom de la forme physique mise en surbrillance. Ce nom est uniquement destiné à votre propre usage afin d'identifier facilement plusieurs formes physiques.
- Supprimer
- Permet de supprimer la forme physique sélectionnée du corps rigide. (La dernière forme physique d'un corps rigide ne peut être supprimée.)
- Copier forme
- Copiez la forme physique sélectionnée dans le Presse-papiers pour être en mesure de la coller ultérieurement (voir ci-dessous). Les paramètres de la forme physique et la transformation locale sont copiés avec le maillage.
- Coller la forme
- Collez une forme physique copiée précédemment (voir ci-dessus) sur le corps rigide courant. Remarque : La nouvelle forme physique ne constitue pas une instance ; toute modification apportée à la forme physique initialement copiée n'affecte pas la nouvelle forme physique après le collage.
- Symétrie de la forme
- Fait pivoter la géométrie de la forme autour de l'axe spécifié (voir Paramètres de symétrie de la forme ci-dessous).
- ... (Paramètres de symétrie de la forme)
- Ouvre une boîte de dialogue permettant de définir l'axe le long duquel la forme est mise en miroir, ainsi que d'indiquer si vous souhaitez utiliser l'axe local ou l'axe universel.
- Régénérer la sélection
- Adapte la forme en surbrillance dans la liste à l'état actuel du maillage graphique. Cette option permet de réajuster la forme physique au maillage graphique après une modification. Cette option est utile, par exemple, pour transformer des sous-objets ou pour mettre un objet à l'échelle.
- Type de forme
- Type de forme physique appliqué à l'élément mis en surbrillance dans la liste Modifier des formes. Les types disponibles sont Sphère, Boîte, Capsule, Convexe, Concave, Original et Personnalisé. Les types Sphère, Boîte et Personnalisé sont des primitives MassFX et effectuent des simulations plus rapidement que les autres coques. Pour de meilleures performances, utilisez le type qui vous paraît le plus simple.
Le contenu de ce panneau déroulant peut varier en fonction du paramètre Type de forme défini. Pour obtenir une description des paramètres de chaque type, reportez-vous à la rubrique Types de formes physiques MassFX.
La modification du type de forme génère une nouvelle forme correspondant au type choisi et redimensionné pour s'adapter aux pourtours du maillage graphique. Les options relatives à la forme (dépendant du type de forme choisi) sont disponibles dans le panneau déroulant Paramètres maillage physique (voir ci-dessous).
- Elément de forme
- Modélise la forme en surbrillance dans la liste des formes de manière à s'apparenter à l'élément sélectionné dans la liste Elément de forme. Par exemple, sélectionnez la primitive Théière et appliquez le modificateur Corps rigide avec l'option Générer la forme par élément activée. Cette option crée quatre éléments de forme physique par défaut, dont le premier constitue le corps de la théière : Elément 1. Si, alors que l'élément 1 est mis en surbrillance dans la liste des formes, vous sélectionnez Elément 2 (poignée) dans la liste, MassFX modifie la forme physique du corps de la théière de manière à ce qu'elle ressemble à une poignée. Si vous choisissez l'option Tous les éléments, l'élément 1 prend la forme et la taille de l'intégralité du maillage de la théière. Si vous modifiez ensuite le paramètre Type de forme (en passant par exemple de l'option Convexe à Boîte), le résultat obtenu est une forme physique de ce type, qui s'adapte à l'élément de forme actif.
- Convertir en forme personnalisée
- Cliquez sur ce bouton pour créer un objet de maillage éditable dans la scène, à partir de la forme physique sélectionnée, et définir le type de forme sur Personnalisé. Vous pouvez utiliser les outils d'édition standard pour ajuster le maillage, puis mettre à jour la forme physique à partir de ce dernier. Pour plus d'informations, reportez-vous à la rubrique Personnalisé.
- Remplacer matériau physique
- Par défaut, chaque forme physique présente dans un corps rigide utilise les paramètres de matériau définis dans le panneau déroulant Matériau physique. Toutefois, il est possible que vous utilisiez un corps rigide complexe comportant de nombreuses formes physiques et dans lequel vous souhaitez utiliser des paramètres différents pour certaines de ces formes. Dans ce cas, activez l'option Remplacer matériau physique. Toutes les propriétés décrites dans cette section fonctionnent de la même façon dans pour le panneau déroulant Matériau physique, mais elles s'appliquent uniquement au maillage physique sélectionné.
- Afficher les coques ombrées
- Lorsque cette option est activée, le rendu est effectué avec des formes physiques ombrées et des objets solides dans des fenêtres ombrées, plutôt que sous la forme de représentations filaires. Activez la propriété d'affichage Transparent pour le maillage graphique afin de visualiser plus facilement les formes physiques.
Panneau déroulant Paramètres de maillage physique
Le contenu de ce panneau déroulant peut varier en fonction du paramètre Type de forme défini. Pour obtenir une description des paramètres de chaque type, reportez-vous à la rubrique Types de formes physiques MassFX.
Panneau déroulant Forces
Utilisez le panneau déroulant Forces pour définir la gravité et appliquer des déformations spatiales de force au corps rigide.
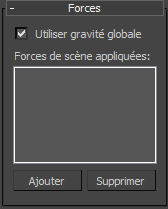
- Utiliser la gravité de l'univers
- Lorsque cette option est désactivée, le corps rigide utilise uniquement les forces appliquées et ne tient pas compte de la configuration de gravité globale. Lorsque cette option est activée, le corps rigide utilise la configuration Gravité globale.
- Forces de scène appliquées
- Répertorie les déformations spatiales de force de la scène qui affectent cet objet dans la simulation. Utilisez le bouton Ajouter pour appliquer une déformation spatiale à l'objet. Pour éviter qu'une déformation spatiale n'affecte l'objet, mettez-la en surbrillance dans la liste, puis cliquez sur Supprimer.
- Ajouter
- Applique à l'objet de la simulation une déformation spatiale de force utilisée dans la scène. Après l'ajout d'une déformation spatiale à la scène, cliquez sur Ajouter et sélectionnez la déformation spatiale dans la fenêtre.
- Supprimer
- Empêche qu'une déformation spatiale appliquée n'affecte l'objet. Commencez par la mettre en surbrillance dans la liste, puis cliquez sur Supprimer.
Panneau déroulant Avancé
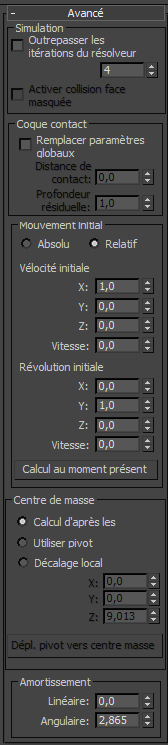
Zone Simulation
- Outrepasser les itérations du résolveur
- Lorsque cette option est activée, MassFX utilise le paramètre d'itérations de résolveur spécifié ici pour ce corps rigide, à la place du paramètre global.
Définissez la valeur numérique sur le nombre de fois où le résolveur applique les collisions et les contraintes. Des valeurs plus élevées peuvent être nécessaires lorsque la simulation utilise de nombreuses contraintes, ou lorsque la tolérance pour les erreurs de connexion est très faible. Les valeurs supérieures à 30 sont généralement inutiles.
- Activer collision face masquée
- Cette option n'est disponible que pour les corps rigides statiques. Lorsque vous spécifiez le type de forme originale d'un corps rigide concave statique, activez cette option pour que les objets dynamiques dans la simulation entrent en collision avec les faces masquées.
Par exemple, prenez une boîte primitive, Convertissez-la en format poly éditable, supprimez un côté, puis transformez-la en un corps rigide statique au type de forme d'origine. Si vous placez un objet dynamique dans la boîte de dialogue, activez l'option Activer la collision de la face masquée de la boîte pour empêcher l'objet de tomber par les côtés.
Groupe Coque contact
Utilisez ces paramètres pour déterminer le volume environnant dans lequel MassFX détecte des collisions entre les corps dans la simulation.
- Remplacer paramètres globaux
- Lorsque ces options sont activées, MassFX utilise les paramètres de chevauchement de collisions spécifiés ici pour les corps rigides sélectionnés, à la place des paramètres globaux.
- Distance contact
- Distance sur laquelle le chevauchement des corps rigides est autorisé.
Une valeur trop élevée peut provoquer une interpénétration visible des objets. Une valeur définie trop faible peut entraîner la présence de bruit, car les objets interpénètrent une image tout en étant alternativement forcés sur une séparation.
Le meilleur choix de valeur dépend de plusieurs facteurs, comme par exemple la taille des objets dans la scène, la proximité de la caméra pour de possibles interpénétrations, les paramètres d'accélération de la gravité, les itérations du résolveur, la quantité d'inflation des formes physiques et la fréquence d'images de la simulation.
- Profondeur résiduelle
- Distance sur laquelle le chevauchement des corps au repos est autorisé. Ce paramètre peut entrer en ligne de compte lorsque vous utilisez la capture des transformations pour définir des corps à leur position initiale dans la simulation. Remarque : Lorsque vous modifiez la valeur Distance contact, la valeur Profondeur résiduelle prend automatiquement la même valeur, à laquelle est ajoutée la différence entre les deux. Par exemple, supposons que la valeur Distance contact est définie sur 10.0 et que Profondeur résiduelle est égale à 8.0 (différence =-2.0). Si vous définissez ensuite Distance contact sur 6.5, la valeur Profondeur résiduelle devient automatiquement 4.5 (6.5 + (-2.0)). Cependant, la modification de la valeur Profondeur résiduelle n'a pas d'incidence sur le paramètre Distance contact.
Zone de mouvement initial
- Absolu/Relatif
- Ce paramètre s'applique uniquement aux corps rigides qui démarrent en tant que corps rigides cinématiques (généralement, ils sont déjà animés) puis qui deviennent ensuite dynamiques au niveau de l'image spécifiée dans le paramètre Jusqu'à image, situé dans le panneau déroulant Propriétés corps rigides. Normalement, la vélocité et la rotation initiales de ce type de corps sont calculées en fonction de l'animation de la dernière image qui précède leur transformation en corps dynamiques. Lorsque cette option est définie sur Absolue, les valeurs de la vitesse et de la rotation initiale (voir ci-dessous) sont substituées par les valeurs basées sur l'animation. Lorsque cette option est définie sur Relatif, les valeurs spécifiées sont ajoutées aux valeurs calculées à partir de l'animation.
- Vélocité initiale
- Direction et vitesse de départ (en unités par seconde) du corps rigide lorsque celui-ci devient dynamique. Les paramètres XYZ sont conservés en tant que vecteurs normalisés, qui peuvent être difficiles à modifier ou à représenter. Pour visualiser la direction de la vélocité initiale et éventuellement la modifier à l'aide de l'outil Rotation, utilisez le niveau de sous-objet Vélocité initiale.
- Révolution initiale
- Axe et vitesse de départ (en degrés par seconde) de la rotation du corps rigide lorsque celui-ci devient dynamique. Les paramètres XYZ sont conservés en tant que vecteurs normalisés, qui peuvent être difficiles à modifier ou à représenter. Pour visualiser l'axe de révolution initiale et éventuellement le modifier à l'aide de l'outil Rotation, utilisez le niveau de sous-objet Révolution initiale.
- Calcul au moment présent
- S'applique aux corps rigides cinématiques animés. Détermine les valeurs du mouvement (voir ci-dessus) pour l'objet animé dans l'image actuelle, puis définit les champs de vélocité et de révolution initiale pour ces valeurs.
Utilisez cette fonction afin d'appliquer les valeurs du mouvement initial à partir d'un point de l'animation du corps cinématique, autre que ceux de l'image à laquelle ce corps devient dynamique.
Zone Centre de gravité
Choisissez l'une des opérations suivantes :
- Calcul d'après les maillagesDétermine automatiquement un centre de masse approprié pour le corps rigide sur la base de sa géométrie.
- Utiliser pivotUtilise le Pivot de l'objet à son centre de gravité.
- Décalage localPermet de définir la distance entre le pivot de l'objet sur les axes X, Y et Z à utiliser pour le centre de gravité.
- Déplacer pivot vers centre de masseReplace le pivot de l'objet au centre de gravité spécifié par le décalage local XYZ. Disponible uniquement lorsque l'option Décalage local est active.
Zone d'amortissement
L'amortissement ralentit les corps rigides. Son utilisation courante permet par exemple de réduire les oscillations dans une simulation ou de créer l'impression qu'un objet se déplace dans un milieu dense.
- Linéaire
- Quantité de force appliquée pour réduire la vélocité de déplacement des objets.
- Angulaire
- Quantité de force appliquée pour réduire la vitesse de rotation des objets.
Panneau déroulant Noeuds relatifs
- Sélection d'une poupée de chiffon
- Sélectionne l'objet Poupée de chiffon auquel le corps rigide appartient. Cette option est uniquement disponible lorsque le corps rigide fait partie d'un objet Poupée de chiffon.