次のコンストレイント タイプから選択します。
ポイント
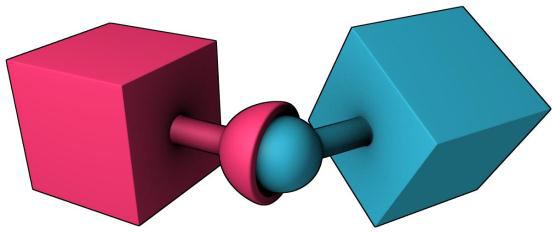
ポイントコンストレイント(Bullet 物理ライブラリではポイント対ポイント コンストレイントと呼ばれる)は、2 つのリジッドボディ間のピボット ポイントがワールド空間で一致するように、トランスレーションを制限します。ポイントコンストレイントは、チェーンリンクなどのエフェクトを作成したり、オブジェクトを一緒に固定するのに使用できます。
ポイントコンストレイントは、以下のアトリビュートをサポートしています。
- 角度ダンピング(Angular Dampening)
ヒンジ(Hinge)
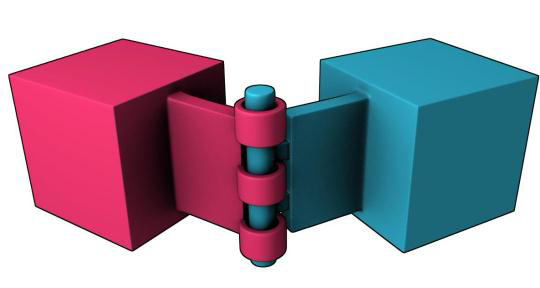
ヒンジ(Hinge)コンストレイントは、ボディが 1 つの軸のみを中心に回転できるように、トランスレーションと 2 つの追加の自由度の角度を制限します。ヒンジ軸は、コンストレイントの Z 軸により定義されます。このコンストレイントは、軸を中心に回転するドアまたはホイールを表すのに便利です。ユーザは、ヒンジの制限とモーター設定を指定することができます。
ヒンジ(Hinge)コンストレイントは、以下のアトリビュートをサポートしています。
- 角度制限の柔らかさ(Angular Limit Softness)
- 角度制限のバイアス(Angular Limit Bias)
- 角度制限の緩和(Angular Limit Relaxation)
- 角度コンストレイントの最小 Z (Angular Constraint Min Z)
- 角度コンストレイントの最大 Z (Angular Constraint Max Z)
- 角度モーターの有効化(Angular Motor Enabled)(Z 軸モーターのオンとオフを切り替えます。)
- 角度モーターのターゲット スピード(Angular Motor Target Speed)(Z 軸のターゲット速度を指定します。)
- 角度モーターの最大フォース(Angular Motor Max Force)(単一のシミュレーション ステップで Z 軸に適用できる最大モーター インパルスを指定します。)
スライダ(Slider)
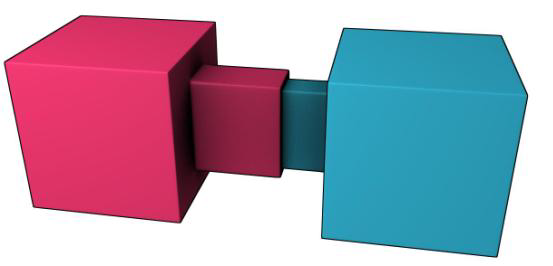
スライダ(Slider)コンストレイントでは、リジッド ボディが 1 つの軸を中心に回転し、同じ軸に沿ってトランスレートできます。スライド軸は、コンストレイントの Z 軸によって定義されます。
スライダ(Slider)コンストレイントは、以下のアトリビュートをサポートしています。
- リニア ダンピング(Linear Damping)
- リニアの柔らかさ(Linear Softness)
- リニアの回復(Linear Restitution)
- リニアにバイアスを制限(Linear Limit Bias)
- リニアに柔らかさを制限(Linear Limit Softness)
- リニア制限の緩和(Linear Limit Relaxation)
- リニア コンストレイントの最小 X(Linear Constraint Min X)
- リニア コンストレイントの最大 X (Linear Constraint Max X)
- リニア モーターの有効化(Linear Motor Enabled)(X 軸上のモーターのオンとオフを切り替えます。)
- リニア モーターのターゲット スピード(Linear Motor Target Speed)(モーターのターゲット速度を指定します。X フィールドだけが使用されます。)
- リニア モーターの最大フォース(Linear Motor Max Force)(最大モーター インパルスを指定します。X フィールドだけが使用されます。)
- 角度ダンピング(Angular Damping)
- 角度の柔らかさ(Angular Softness)
- 角度の回復(Angular Restitution)
- 角度制限の柔らかさ(Angular Limit Softness)
- 角度制限のバイアス(Angular Limit Bias)
- 角度制限の緩和(Angular Limit Relaxation)
- 角度コンストレイントの最小 X (Angular Constraint Min X)
- 角度コンストレイントの最大 X (Angular Constraint Max X)
- 角度モーターの有効化(Angular Motor Enabled) (X 軸上のモーターのオンとオフを切り替えます。)
- 角度モーターのターゲット スピード(Angular Motor Target Speed)(X 値のみが使用されます。)
- 角度モーターの最大フォース(Angular Motor Max Force)(X 値のみが使用されます。)
コーンツイスト(Cone-Twist)
コーンツイスト(Cone-Twist)コンストレイントは、以下のアトリビュートをサポートしています。
- 角度ダンピング(Angular Damping)
- 角度制限の柔らかさ(Angular Limit Softness)
- 角度制限のバイアス(Angular Limit Bias)
- 角度制限の緩和(Angular Limit Relaxation)
- 角度コンストレイントの最大 X (Angular Constraint Max X)(ツイスト スパン角度を指定します。)
- 角度コンストレイントの最大 Y (Angular Constraint Max Y)(スイング スパン 2 角度を指定します。)
- 角度コンストレイントの最大 Z (Angular Constraint Max Z)(スイング スパン 1 角度を指定します。)
- 角度モーターの有効化(Angular Motor Enabled)(X 軸上のモーターのオンとオフを切り替えます。)
- 角度モーターの最大フォース X (Angular Motor Max Force X)
6 自由度(Six Degrees of Freedom)
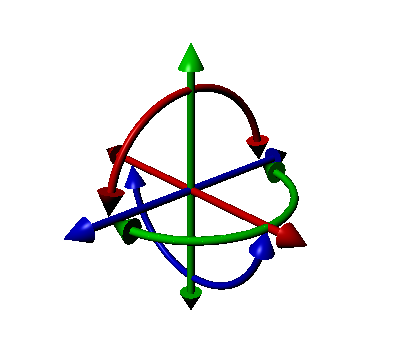
6 自由度(Six Degrees of Freedom)(SixDOF)コンストレイントでは、6 自由度のそれぞれが設定されている場合、さまざまな標準コンストレイントをエミュレートできます。最初の 3 つの DOF 軸は、リジッド ボディのトランスレーションを表すリニア軸です。残りの 3 つの DOF 軸は、角度モーションを表します。それぞれの軸を、ロック、解放、または制限できます。既定では、すべての軸のロックが解除されます。
6 自由度(Six Degrees of Freedom)コンストレイントは、以下のアトリビュートをサポートしています。
- リニア ダンピング(Linear Damping)
- リニアの柔らかさ(Linear Softness)
- リニアの回復(Linear Restitution)
- リニア コンストレイント(Linear Constraint)
- リニア コンストレイントの最小(Linear Constraint Min)
- リニア コンストレイントの最大(Linear Constraint Max)
- リニア モーターの有効化(Linear Motor Enabled)
- リニア モーターのターゲット スピード(Linear Motor Target Speed)
- リニア モーターの最大フォース(Linear Motor Max Force)
- 角度ダンピング(Angular Damping)
- 角度の柔らかさ(Angular Softness)
- 角度の回復(Angular Restitution)
- 角度コンストレイント(Angular Constraint)
- 角度コンストレイントの最小(Angular Constraint Min)
- 角度コンストレイントの最大(Angular Constraint Max)
- 角度モーターの有効化(Angular Motor Enabled)
- 角度モーターのターゲット スピード(Angular Motor Target Speed)
- 角度モーターの最大フォース(Angular Motor Max Force)
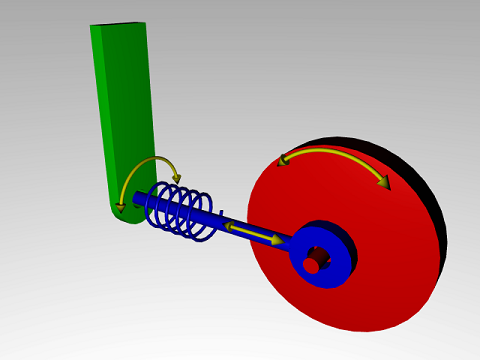
スプリング ヒンジ(Spring Hinge)
スプリング ヒンジ(Spring Hinge)には 3 つの自由度があります。これには、Z (軸 1)と X (軸 2)に沿った 2 つの回転自由度と、サスペンション スプリングを使用した、Z (軸 1)に沿った 1 つのトランスレーション自由度が含まれます。スプリング ヒンジ(Spring Hinge)コンストレイントは自動車のステアリング ホイールです。1 つの軸ではホイールを進ませることができ、他の軸ではホイールを回転できます。このケースでは、軸 1 を Y と位置合わせするために、X でスプリング ヒンジを -90 回転する必要があります。
スプリング ヒンジ(Spring Hinge)コンストレイントには、軸 2 のアンカー ポイントがあります。これは、コンストレイントの位置によって指定されます。軸 1 は、ボディ 1 に対して相対的に指定されます。ボディ 1 がシャーシの場合、これはステアリング軸になります。軸 2 はボディ 2 に対して相対的に指定され、軸 1 に対して垂直です(X 沿い)。ボディ 2 がホイールの場合、これはホイールの軸になります。軸 1 (Z 沿い)には、スプリングのほか、角度とリニアの制限を設定できますが、軸 2 (X 沿い)はフリーになります。スプリングとモーターを同時に有効にすることはできません。軸 2 を駆動したい場合は、ボディ 2 の X 軸のトルク インパルスを修正します。
スプリング ヒンジ(Spring Hinge)コンストレイントは、以下のアトリビュートをサポートしています。
- リニア コンストレイント(Linear Constraint)
- リニア コンストレイントの最小 Z(Linear Constraint Min Z)
- リニア コンストレイントの最大 Z (Linear Constraint Max Z)
- リニア スプリングの有効化(Linear Spring Enabled)
- リニア スプリングの固さ(Linear Spring Stiffness)
- リニア スプリングのダンピング(Linear Spring Dampening)
- 角度コンストレイント(Angular Constraint)
- 角度コンストレイントの最小 Z (Angular Constraint Min Z)
- 角度コンストレイントの最大 Z (Angular Constraint Max Z)
- 角度スプリングの有効化(Angular Spring Enabled)
- 角度スプリングの固さ(Angular Spring Stiffness)
- 角度スプリングダンピング(Angular Spring Dampening)
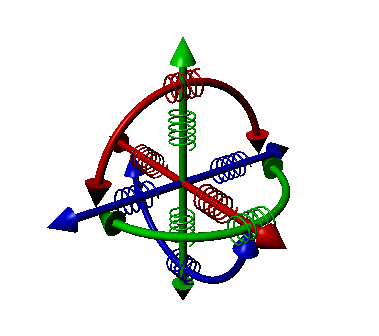
スプリング 6 自由度(Spring Six Degrees of Freedom)
スプリング 6 自由度(Spring Six Degrees of Freedom)(SpringSixDOF)コンストレイントは、6 自由度(Six Degrees of Freedom)コンストレイントのバリアントであり、各自由度にスプリングが追加されています。スプリングとモーターをこのコンストレイントで結合することはできません。
スプリング 6 自由度(Spring Six Degrees of Freedom)コンストレイントは、以下のアトリビュートをサポートしています。
- リニア コンストレイント(Linear Constraint)
- リニア コンストレイントの最小(Linear Constraint Min)
- リニア コンストレイントの最大(Linear Constraint Max)
- リニア スプリングの有効化(Linear Spring Enabled)
- リニア スプリングの固さ(Linear Spring Stiffness)
- リニア スプリングのダンピング(Linear Spring Dampening)
- 角度コンストレイント(Angular Constraint)
- 角度コンストレイントの最小(Angular Constraint Min)
- 角度コンストレイントの最大(Angular Constraint Max)
- 角度スプリングの有効化(Angular Spring Enabled)
- 角度スプリングの固さ(Angular Spring Stiffness)
- 角度スプリングダンピング(Angular Spring Dampening)