腕と脚の編集作業はほぼ同じですが、このトピックではわずかな違いをいくつか取り上げて説明します。
-
リムのボーンを選択 >
 [修正](Modify)パネル > [リム セットアップ](Limb Setup)ロールアウト
[修正](Modify)パネル > [リム セットアップ](Limb Setup)ロールアウト
腕と脚の違い
リム作成ボタンはなく、腕または脚を作成するオプションがあります。ただし、腕と脚にはほんの些細な違いしかありません。既定値では、脚には足プラットフォーム(矩形の IK ターゲット)があります。必要に応じて、十字型の IK ターゲットではなく、足プラットフォームを使用するように腕を変更することもできます。
腕は脚と違い、ハブからモーションを継承します。腕は胸部の回転を継承しますが、常に側面にあります。一方脚は既定値では下向きに設定されており、回転によって完全に交差します。この動作は、新しいレイヤを追加して、リムを FK に、またすべての回転の値をゼロに設定すると確認できます。脚と脚がアタッチされているハブとの回転角度の差は 180 度で、腕と腕のアタッチ先の回転角度の差は 90 度です。
インタフェース
リムの構成には、数多くのサブ要素を使用できます。たとえば、鎖骨、四肢骨、手のひらなどです。リムのマスター パラメータは、[リム セットアップ](Limb Setup)ロールアウトにあります。
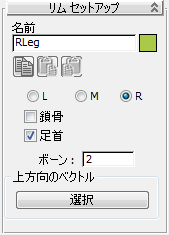
- 名前
-
リムの名前をフィールド ボックスで編集します。「CAT の命名システムの使用」を参照してください。
- カラー見本
-
クリックしてリムの色を変更します。
- [L]、[M]、[R]
-
リムが、左、中央、右の腕または脚のどの要素として機能するかを選択します。中央のリムは三脚の構造に便利です。
-
 [コピー](Copy)、[貼り付け](Paste)、[貼り付け/ミラー](Paste Mirrored)
[コピー](Copy)、[貼り付け](Paste)、[貼り付け/ミラー](Paste Mirrored) -
リムの設定をコピーして他のリムへ貼り付けたり、他のハブの設定をコピーして貼り付けるときにこれらのボタンを使用します。「リグ パーツのコピーと貼り付け」を参照してください。
- 鎖骨
-
オンにすると、リムはリムとハブの間のエクストラ ボーンである鎖骨を組み込みます。鎖骨は、リムの IK チェーンの一部ではありません。
既定値では、腕の[鎖骨](Coll)オプションはオン、脚の[鎖骨](Coll)オプションはオフになっています。
- [手のひら](Palm)、[足首](Ankle)
-
オンの場合、腕の終端に手のひらが配置され、脚の終端に足首が配置されます。「手のひら、足首、指」を参照してください。
- ボーン
-
リムに含まれるボーンの数。範囲は 1 ~ 20 です。
- 上ベクトルノードを選択
-
オンにすると、アップノードが IK ターゲットとして作成されます。アップノードとは、リムの軸上にある十字型のポイント ヘルパーです。これにより、アップノードがリムのアップベクトルを定義するようになり、モーションが既定値より若干厳しく制限されます。アップノードは、ルックアット コンストレイントを使用して「上方向」を定義する場合に特に便利です。