オイラー XYZ 回転コントローラは、複数の単一値実数コントローラを結合した合成コントローラです。X 軸、Y 軸、および Z 軸を基準とした回転角度を指定します。オイラー XYZ 回転は、クォータニオン回転(TCB 回転コントローラで使用される)ほどスムーズではありませんが、回転ファンクション カーブを編集できる唯一の回転タイプです。
-
ビューポート内でオブジェクトを選択 >
 [モーション](Motion)パネル > [コントローラを割り当て](Assign Controller)ロールアウト > 回転トラックを選択既定コントローラとしてオイラー XYZ が割り当てられます。
[モーション](Motion)パネル > [コントローラを割り当て](Assign Controller)ロールアウト > 回転トラックを選択既定コントローラとしてオイラー XYZ が割り当てられます。
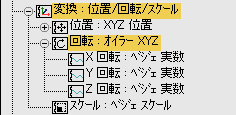
オイラー XYZ 回転コントローラは、位置、回転、およびスケール変換の X、Y、Z コンポーネントに対して個別にトラックを割り当てます。ただし、既定値では、コントローラは軸ごとに 3 つのキーを割り当てます。これを無効にするには、[ユーザ インタフェースをカスタマイズ](Customize User Interface)の各種アクションを使用して明示的な軸キーを作成します。これらのアクションは[メイン UI](Main UI)グループ  [Set Key Tools]カテゴリから使用できます。
[Set Key Tools]カテゴリから使用できます。
このコントローラでは、ジンバル参照座標系を使用します。他の座標系を使用すると、1 つの軸に対する回転によって、少なくとも 2 つのトラックが変更されます。ジンバル回転の場合、1 つの軸に対する回転によって変更されるトラックは 1 つだけなので、ファンクション カーブを編集しやすくなります。
オイラーと TCB 回転
オイラー回転には、3ds Max 5 以前の既定値の回転コントローラであった TCB 回転コントローラと比べるとさまざまなメリットがあります。 まず、オイラー回転はファンクション カーブをサポートしていますが、TCB はサポートしていません。また、オイラー回転では 3 本の個別のカーブをカーブ エディタで操作できます。TCB 回転はテンション、連続性、およびバイアス設定でしかコントロールできないため、X 回転、Y 回転、Z 回転を個別にキーフレーム設定したり操作するのは難しくなります。
一方、TCB 回転では、特定キーフレームで 180 度より大きい回転が許可されます。[回転ワインドアップ](Rotation Windup)オプションで回転する場合は、360 度より大きい回転値を取得できます。
オイラー回転と波形実数コントローラ
オイラー回転コントローラはラジアンを使用するため、オイラー軸に他のコントローラを適用する際には単位調整が必要です。たとえば、プロパティ グラフにおける波形実数コントローラの既定値の振幅は 100 です。波形実数コントローラをオイラー軸に適用すると、既定値の振幅は 100 ラジアンになります。つまり、[振幅](Amplitude)の値は 5729.598 (度/100 ラジアン)です。
オイラー回転とノイズ実数コントローラ
ノイズ実数コントローラをオイラー軸に適用する場合、[強度](Strength)の既定値は 286.479 度、すなわち 10 ラジアンの 50% (最大変形)になります。
オイラー回転と MIDI モーション キャプチャ コントローラ
MIDI モーション キャプチャ コントローラを適用する場合は、パラメータのスケール処理はラジアンで計算され、標準の最大値(1.0)が上限値(57.2958)になります。
手順
例: オイラー XYZ 回転を使用するには:
- ボックスを作成します。
- [モーション](Motion)パネルに移動し、回転コントローラとして[オイラー XYZ](Euler XYZ)が割り当てられていることを確認します。[オイラー XYZ](Euler XYZ)が割り当てられていない場合は、[コントローラを割り当て](Assign Controller)ロールアウトのリストで[回転](Rotation)トラックをハイライトして
 ([コントローラを割り当て](Assign Controller))をクリックし、[コントローラを割り当て](Assign Controller)ダイアログ ボックスのリストで[オイラー XYZ](Euler XYZ)を選択します。[OK]をクリックします。
([コントローラを割り当て](Assign Controller))をクリックし、[コントローラを割り当て](Assign Controller)ダイアログ ボックスのリストで[オイラー XYZ](Euler XYZ)を選択します。[OK]をクリックします。  をオンにします。
をオンにします。 - [PRS パラメータ](PRS Parameters)ロールアウトの一番下にある[回転](Rotation)ボタンをクリックします。
- 必要に応じて、[オイラー パラメータ](Euler Parameters)ロールアウトで[X]回転軸をクリックします。
- [PRS パラメータ](PRS Parameters)ロールアウトの[キーを作成](Create Key)領域で[回転](Rotation)ボタンをクリックします。
すると、3ds Max によって回転キーが自動的に作成されます。
- タイム スライダをフレーム 50 に移動します。
- もう一度、[PRS パラメータ](PRS Parameters)ロールアウトの[キーを作成](Create Key)領域で[回転](Rotation)ボタンをクリックします。
- [キー情報(基本機能)](Key Info (Basic))ロールアウトで、[値](Value)を 500 に設定します。
- [オイラー パラメータ](Euler Parameters)ロールアウトで[Z]回転軸ボタンをクリックし、[キー情報(基本機能)](Key Info (Basic))ロールアウトの[値](Value)フィールドに 90 と入力ます。
アニメーションを
 再生します。ボックス オブジェクトが、X 軸を中心に 500 度、Z 軸を中心に 90 度回転します。この場合は、まず X 軸を中心に回転した後、続いて Z 軸を中心に回転します。
再生します。ボックス オブジェクトが、X 軸を中心に 500 度、Z 軸を中心に 90 度回転します。この場合は、まず X 軸を中心に回転した後、続いて Z 軸を中心に回転します。
ローカル回転コントロールのリスト コントローラで[オイラー XYZ](Euler XYZ)を使用するには:
- ローカル回転コントロールを含めるオブジェクトを選択します。たとえば、ティーポットとダミーを作成します。
- ダミーをアニメートします。
- [モーション](Motion)パネルを開きます。
- [コントローラを割り当て](Assign Controller)ロールアウトで、[回転](Rotation)を選択し、ルックアット コントローラをティーポットに 割り当て、ルックアット ターゲットとしてダミーを割り当てます。
ダミーによって回転が制御されるオブジェクトができました。
- 回転:ルックアット コントローラをウィンドウ内で選択した状態で、 ([コントローラを割り当て](Assign Controller))を再びクリックし、[回転リスト](Rotation List)を選択します。
リストの最初の回転コントローラとしてルックアット コンストレイントが適用された状態で、リスト コントローラができました。
- ウィンドウを下にスクロールし、[使用可能](Available)ラベルが付いたエントリを選択し、[コントローラを割り当て](Assign Controller)を再びクリックします。
- [オイラー XYZ](Euler XYZ)を選択します。
最初のコントローラがルックアット回転、次のコントローラがオイラー XYZ のリスト コントローラができました。
- [回転リスト](Rotation List)ロールアウトで、[レイヤ](Layers)ウィンドウの[オイラー XYZ](Euler XYZ)をハイライトし、[アクティブ](Active)ボタンをクリックします。
- [オイラー パラメータ](Euler Parameters)ロールアウトで、[軸配列](Axis Order)を[ZYX]に変更します。
ルックアット回転コントロールに関係なく、回転をアニメートできるようになりました。バージョン 4 以前で使用できたローカル オイラー コントローラと同じように動作します。
リスト コントローラとオイラー XYZ 回転コントローラを組み合せると、3ds Max の以前のバージョンで使用できたローカル オイラー回転コントローラと同じことを行うことができます。
インタフェース
オイラー パラメータは[モーション](Motion)パネルに表示されます。
このロールアウトは、[PRS パラメータ](PRS Parameters)ロールアウトで[回転](Rotation)ボタンを選択すると表示されます。
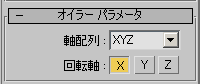
- 軸配列
-
回転が計算される軸の順序を選択します。既定値では、XYZ で、X 軸を中心とした回転が最初に実行されます。
- X
-
X 軸を中心とした回転角度のコントローラ プロパティを表示します。
- Y
-
Y 軸を中心とした回転角度のコントローラ プロパティを表示します。
- Z
-
Z 軸を中心とした回転角度のコントローラ プロパティを表示します。
各座標軸の回転には、実数データを使用する個別のコントローラが使用されます。たとえば、X 軸回転と Y 軸回転にはベジェ実数コントローラが使用され、Z 軸回転にはノイズ実数コントローラが使用される場合があります。