[カメラ トラッカー](Camera Tracker)ユーティリティの[位置合わせの移動](Match Move)ロールアウトでは、トラッキング段階で収集したムービー フィーチャの 2D 位置データを、3ds Max シーン内の関連付けられた 3D フィーチャ ポイントと対応付けることによって、カメラ アニメーションを自動的に生成します。
-
 [ユーティリティ](Utilities)パネル > [ユーティリティ](Utilities)ロールアウト > [その他](More)ボタン > [ユーティリティ](Utilities)ダイアログ ボックス > [カメラ トラッカー](Camera Tracker) > [位置合わせの移動](Match Move)ロールアウト
[ユーティリティ](Utilities)パネル > [ユーティリティ](Utilities)ロールアウト > [その他](More)ボタン > [ユーティリティ](Utilities)ダイアログ ボックス > [カメラ トラッカー](Camera Tracker) > [位置合わせの移動](Match Move)ロールアウト
インタフェース
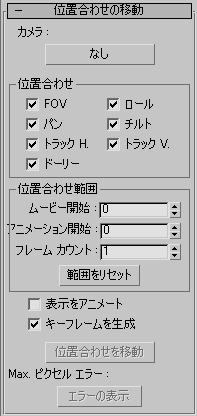
- カメラ
- マッチムーブするカメラを選択するためのオブジェクト選択モードに入ります。シーン内でカメラを直接選択するか、H を押して[シーンから選択](Select From Scene)ダイアログ ボックスを開きます。カメラを選択すると、カメラ名がボタンに表示され、ユーティリティのその他のボタンとコントロールが使用可能になります。選択したカメラは、MOT 設定ファイルに記録され、[カメラ トラッカー](camera tracker)ユーティリティでムービーを再び開いたときに復元されます。トラッカーのポイント シーン オブジェクトと同様、カメラ名も保存され、再ロードで使用されるので、必ず固有の名前にします。選択するカメラは、フリー カメラでなければなりません。カメラは、シーン内の任意の位置および方向で配置できます。
[位置合わせ](Match)領域
マッチムーブの際に見積もるカメラ パラメータを選択できます。チェックマークを消したパラメータは、現在のカメラ アニメーションまたはカメラ位置から計算されます。そのため、既に分っている動きやパラメータを使って、マッチング カメラを事前に配置またはアニメートし、不明のパラメータだけをマッチング機能によって見積もることができます。見積もりが必要なパラメータの数が減れば、見積もりの精度が実質的に向上します。
- FOV
- カメラの視野(FOV)
- パン
- ローカル カメラの Z 軸に対する回転
- チルト
- ローカル カメラの X 軸に対する回転
- ロール
- ローカル カメラの Y 軸に対する回転
- ドーリー
- ローカル カメラの Y 軸に沿った移動
- トラック H
- ローカル カメラの X 軸に沿った移動
- トラック V
- ローカル カメラの Z 軸に沿った移動
[位置合わせ範囲](Match Range)領域
ムービー フレームと 3ds Max シーンのアニメーション フレームとの関連付けを設定するために、マッチングするフレーム範囲を設定できます。 既定値では、どちらの開始フレームも 0 (ゼロ)に設定され、フレーム カウントは、ムービーまたはシーン アニメーションのうちの少ない方のフレーム数に設定されます。[ムービー開始](Movie Start)編集ボックスまたは[アニメーション開始](Animation Start)編集ボックスに 0 (ゼロ)以外のフレームを設定すると、アニメーションのフレーム範囲に対して相対的な位置に、ムービーのフレーム範囲を設定できます。マッチングの位置データは、[ムービー開始](Movie Start)編集ボックスの値で開始するトラッカー フレームのデータから取得されます。また、カメラのマッチングおよびアニメートは、これらのトラッカー フレームから開始します。
- ムービー開始
- ムービー内のマッチング範囲の開始フレームを設定します。
- アニメーション開始
- アニメーション内の範囲の開始フレームを設定します。アニメーション範囲とムービー範囲が異なる場合に使用します。
- フレーム カウント
- マッチングするフレーム数を設定します。
- 範囲をリセット
- 現在のムービーと 3ds Max シーンの設定から、マッチング範囲の編集ボックスに、最大フレーム数およびカウントの範囲を再ロードします。 これは、トラッカーを開いているときにアニメーション フレーム範囲を変更する場合に便利です。
- 表示をアニメート
- 3ds Max ビューポートを表示するかどうか、および[ムービー](Movie)ウィンドウで、マッチング結果の表示をフレームごとに更新するかどうかを指定します。 この表示の更新には、非常に時間がかかることがあります。そのため、ほとんどの場合、このチェックマークを消し、トラック ビューでカメラファンクション カーブを参照するか、マッチングの後で、3ds Max アニメーションを 1 フレームずつ移動してマッチング結果をレビューするほうが便利です。
- キーフレームを生成
- 各フレームで、見積もったパラメータのキーフレームを生成します。
- 位置合わせを移動
- マッチング処理を開始します。
- [Max. ピクセル エラー]
- 実行中のトラッキング エラーおよびフレームを表示します。エラーは、ピクセル小数で示され、フィーチャと、それに関連付けられたトラッキング オブジェクトの表示位置との間の距離のうち、マッチングしたすべてのフレーム中で最大のものを表します。この距離によって、マッチングがどれだけ適切であるかを全般的に見積もることができます。また、エラーが不確定な場合に、調べるフレームを判断することもできます。ライブ カメラ マッチ モードでトラッカー ギズモを移動すると、それに応じてピクセル エラー表示も更新され、カメラの現在の最大マッチング距離が示されます(カメラ トラッカー/[ムービー ステッパー](Movie Stepper)ロールアウト参照)。
マッチ ポイントに重みを指定した場合は、重みを付けていないポイントに対してエラーが分散される傾向があるため、エラーが過大に評価されることがあることに注意してください。
- エラーの表示
- マッチしたフレームごとに最大エラーのリストが表示されているテキスト ウィンドウが開きます。これによってマッチング フレームのセット全体を参照でき、チェックする必要のあるフレームを識別できます。