오브젝트에 링크 제약 조건을 할당하여 한 상위와 다른 상위 간의 링크를 애니메이션합니다. 도구 모음의 일반 선택 및 연결 및 선택 연결 해제 버튼을 사용하는 대신 링크 제약 조건을 사용합니다. 애니메이션 제약 조건을 참조하십시오.
링크 제약 조건 사용 예는 한 손에서 다른 손으로 공을 전달하는 경우에서 볼 수 있습니다. 프레임 0에서 공이 첫 번째 손에 있다고 가정합니다. 양 손이 프레임 50에서 만난 다음 프레임 100까지 떨어져 있도록 애니메이션됩니다.
공의 링크를 애니메이션하려면 다음을 수행하십시오.
 모션 패널에서 링크 제약 조건을 공의 변환 제어기로 할당합니다. 애니메이션 메뉴에서 제약 조건
모션 패널에서 링크 제약 조건을 공의 변환 제어기로 할당합니다. 애니메이션 메뉴에서 제약 조건  링크 제약 조건을 선택하여 공에 링크 제약 조건을 설정할 수도 있습니다.
링크 제약 조건을 선택하여 공에 링크 제약 조건을 설정할 수도 있습니다. -
 시간 슬라이더를 프레임 0으로 이동하고 모션 패널에서 링크 추가를 클릭한 다음 공을 들고 있는 손을 클릭합니다. 이제 공이 손에 연결된 것처럼 손과 함께 이동합니다.
시간 슬라이더를 프레임 0으로 이동하고 모션 패널에서 링크 추가를 클릭한 다음 공을 들고 있는 손을 클릭합니다. 이제 공이 손에 연결된 것처럼 손과 함께 이동합니다. - 시간 슬라이더를 두 번째 손이 공을 잡도록 할 프레임 50으로 드래그하고 링크 추가를 클릭한 다음 두 번째 손을 클릭합니다. 이 프레임부터는 공이 두 번째 손에 연결된 것처럼 움직입니다.
애니메이션을 재생하면 두 번째 링크를 추가한 프레임 50까지 공이 첫 번째 손과 함께 이동한 다음 두 번째 손에 전달되어 나머지 애니메이션 동안 유지됩니다.
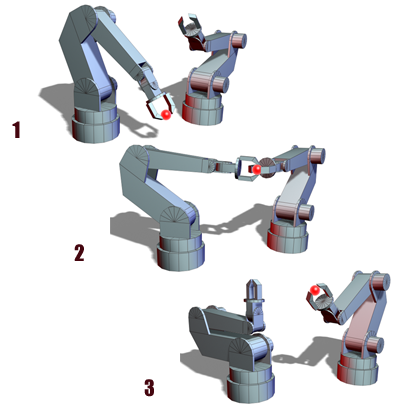
로봇 팔이 공을 한 손에서 다른 손으로 전달합니다.
링크 추가 및 삭제
모션 패널에서 링크를 추가하고 삭제합니다. 링크 매개변수 롤아웃을 확장하고 링크 추가 또는 링크 삭제를 클릭합니다.
- 링크 추가를 클릭한 다음 상위로 연결할 오브젝트를 클릭합니다. 링크를 추가한 프레임에서 컨트롤이 전달됩니다. 시작 시간 매개변수를 사용하여 링크 프레임을 변경할 수 있습니다.
- 리스트에서 상위 오브젝트의 이름을 클릭한 다음 링크 삭제를 클릭하여 링크를 제거합니다.
링크 제약 조건의 특성은 다음과 같습니다.
- 링크 제약 조건은 하위 오브젝트에 적용된 링크 상속 설정을 사용합니다.
- 링크 제약 조건을 사용하는 오브젝트는 실제 하위 오브젝트가 아니며 연결된 상위 오브젝트의 하위 트리에 나타나지 않습니다.
- 링크 제약 조건이 있는 오브젝트는 IK 솔루션에 사용되지 않습니다.
표준에 연결
표준에 연결 버튼을 사용하여 오브젝트를 표준에 연결할 수도 있습니다. 이렇게 하면 더미 오브젝트를 사용하지 않고 오브젝트가 고정됩니다. 표준에 연결을 클릭하기만 하면 자동으로 표준이 대상으로 입력됩니다.
키 모드
세 가지 키 모드 중에서 선택할 수 있습니다. 키 모드에 따라 키프레임이 링크 제약 조건의 일부로 연결된 오브젝트에 기록되는 방법이 결정됩니다. 세 옵션은 다음을 제공합니다.
- 키 없음 모드
-
관련된 오브젝트에 대한 키가 만들어지지 않습니다. 트랙 바에 아무 키도 표시되지 않습니다.
- 키 노드
-
일부 오브젝트에 대해 키를 설정합니다. 하위은 하위 오브젝트에만 키를 적용합니다. 상위는 상위와 하위 오브젝트에 모두 키를 적용합니다.
- 전체 계층에 키 지정
-
선택된 노드 및 이 노드의 전체 계층에 키프레임을 적용합니다. 하위은 선택된 오브젝트 및 해당 계층의 노드(표준까지)에 키를 지정합니다. 상위는 상위와 하위 및 세 계층 모두(표준까지)에 키를 지정합니다.
링크 제약 조건의 파생 효과
링크 제약 조건은 링크가 한 상위에서 다른 상위로 변경될 때 하위 오브젝트가 위치를 점프하지 않도록 합니다.
이전 예에서는 다음을 준수해야 합니다.
- 프레임 0에서 50까지 공이 첫 번째 손을 기준으로 일정하게 유지됩니다.
- 프레임 50에서 100까지 공이 두 번째 손을 기준으로 일정하게 유지됩니다.
- 프레임 50에서 링크 컨트롤이 변경될 때 공이 점프하지 않습니다.
프레임 75에서 두 번째 손의 애니메이션을 변경하면 링크 시간(프레임 50)에 공에 상대적인 손의 위치가 영향을 받습니다. 이러한 상대 위치 변경은 두 번째 손에 연결되어 있는 모든 프레임에서 공에 영향을 줍니다. 따라서 프레임 75에서 손의 위치를 변경하면 하위의 위치도 비직관적 방식으로 변경됩니다. 그러나 애니메이션을 재생할 때는 위의 세 가지 규칙을 모두 준수합니다.