相邻部件之间的连接可能会出现各种不同的问题。其中一个问题是,节点可能无法按照预期或所需方式连接在一起。当由两个不同单元类型组成的部件相连时,每个节点处的自由度 (DOF) 最小的单元类型将规定连接的行为。例如,没有旋转 DOF 的单元(例如,块体和四面体)无法抵制力矩。因此,这些连接没有转动刚度。支持的节点自由度将规定部件之间传递的载荷类型。此页面介绍了其中的一些问题,并提供了生成所需连接特征的方法。
板和块体之间的粘合接触:
导致此问题的原因是每个部件的自由度各不相同。块体只有三个平动自由度(Tx、Ty 和 Tz),而板(和壳)具有所有 DOF,但绕单元法向的转动除外。因此,块体无法将力矩应用于板来防止板转动。若无特殊注意,沿一条直线上的节点连接板和块体将生成一个枢纽。这在图 1 中进行了说明。尽管下图中所示示例在板另一端的约束作用下非常稳定,但在线性静态应力中,枢纽连接通常会导致模型非静态稳定。
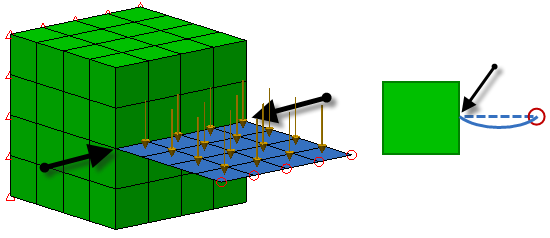
图 1:块体和板的铰链组合
黑色箭头表示枢纽线。右侧的原理图显示了一个侧视图以及板的变形方式;请注意枢纽线处的转动。如果不支持板的自由端,则板将围绕枢纽线自由转动,这会导致配置静态不稳定。
若要避免这种枢纽效应,需要将板和块体之间的粘合接触分布在一个区域上;特别地,至少分布在不在一条直线上的三个节点处。请参见图 2。

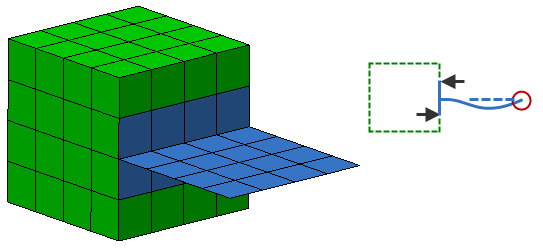
图 2:块体和板的静态稳定组合
在顶部的方法中,板的一个单元深深地嵌入块体中。(这些单元已收缩,以显示彼此之间的空间。)此方法适用于手动构建的(结构化网格)模型。在底部的方法中,块体表面上创建了板的三通接头。在右侧原理图(显示了一个侧视图)中,箭头表示块体/板接口处的反作用力。(实际上,这些是在块体和板节点之间传递的力。)由于力偶可以抵制力矩载荷,因此板现在是静态稳定的。
块体和梁之间的粘合接触:
梁和块体之间的连接与板-块体连接存在类似的问题;块体无法防止梁转动。梁支持所有六个自由度(三个平动和三个旋转),但是块体仅支持三个平动 DOF(Tx、Ty 和 Tz)。解决方案同样类似于板/梁连接;将多个梁(或辐条)连接到块体。梁必须在三个或更多不在一条直线上的点处连接到块体,才能形成一个静态稳定解。在单个点处附着到块体的梁起球形接头的作用,这通常会导致模型静态不稳定。图 3 显示了一个示例。
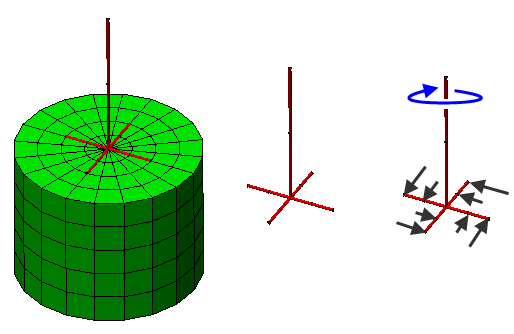
图 3:块体和梁的静态稳定组合
图的左侧将梁和块体显示在一起,中间仅显示梁。请注意,垂直构件连接到在多个点处束缚于块体的四个其他梁。如果将扭矩应用于梁(例如,在右侧的原理图中),则黑色箭头表示块体产生的反作用力。
 “创建远程载荷”。如果使用的是 CAD 模型,请使用“绘制”“设计”“形心创建”命令,在表面形心处创建构造顶点。请分别参见远程载荷和约束和添加几何体页面。
“创建远程载荷”。如果使用的是 CAD 模型,请使用“绘制”“设计”“形心创建”命令,在表面形心处创建构造顶点。请分别参见远程载荷和约束和添加几何体页面。 板和梁之间的粘合接触:
将板与梁相结合时,需要考虑两种情况。
- 板不能抵制绕板面垂直轴的力矩。因此,如果将梁垂直附着到板,则板单元将无法防止其转动。为了避免这种情况,建议您将梁(辐条)从垂直梁的末端添加到板中的其他几个节点,以构成一个静态稳定模型。该方法与图 3 中所示的梁/块体连接相同。
- 如果对位于板上的梁进行建模,则必须记住,您是在绘制板单元的中间面和梁单元的中性轴。因此,如果沿板绘制梁部件,则您实际上是在绘制朝板中间面倾斜的梁中性轴。这很有可能不准确。若要在“FEA 编辑器”环境内对这种情况进行正确建模,则可采用两种方法。
- 您可以分别绘制梁和板实际所在的梁中性轴和板中间面,并在多个位置将其与有效的刚性梁连接在一起。
- 您可以沿板的中间面绘制梁的中性轴。然后,使用“选择”“选择”“直线”选择梁单元。在显示区域中单击鼠标右键,然后从关联菜单中选择“添加”“梁偏置”(或单击“设置”“梁载荷”“梁偏置”功能区命令)。指定从绘制梁的位置到中性轴实际所在的位置之间的距离和方向。例如,如果沿 0.5 英寸的厚板连接 8 英寸高的宽翼缘梁,则适当方向上的偏移距离将为 4.25 英寸(板厚度的一半减去梁高度的一半)。