Quando si crea una traiettoria di movimento, in Revit viene analizzata la vista corrente e viene calcolato un percorso ottimale (il più breve). Durante i calcoli, la traiettoria di movimento evita le categorie identificate come ostacoli (definite nelle impostazioni) e tiene conto della larghezza di una tipica persona e dell'oscillazione corporea mentre passeggia.
L'analisi della traiettoria di movimento si basa sul motore di analisi Simulex. Viene eseguita in quattro passaggi:
- Definire una griglia e generare un percorso preliminare.
- Trovare gli ostacoli più vicini lungo il percorso preliminare.
- Utilizzare i punti di snap all'angolo per generare un percorso modificato.
- Eseguire l'offset dagli ostacoli per generare un percorso di "passeggiata" ottimale.

Questi passaggi sono processi interni dell'analisi. Nelle sezioni riportate di seguito sono descritti i passaggi per definire con maggiore chiarezza il modo in cui la linea del percorso viene generata.
Generazione di un percorso
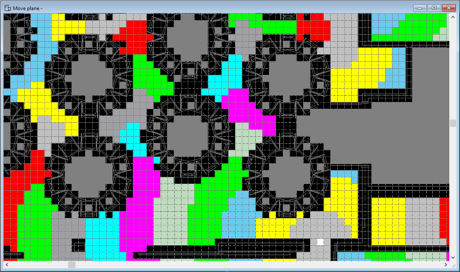
Per iniziare un'analisi della traiettoria di movimento, in Revit viene applicata una griglia alla vista di pianta. La risoluzione della griglia è fissata a 0,2 metri. Ad ogni cella della griglia viene assegnato un valore relativo alla distanza dal punto finale del percorso. I colori nell'immagine indicano gli intervalli di distanza.
Le celle contenenti le categorie definite come ostacoli non vengono prese in considerazione (mostrate in nero nell'immagine). Se una cella è delimitata su due lati da queste celle rimosse, anche tale cella non viene presa in considerazione. Nell'immagine riportata di seguito è mostrata questa condizione tra alcuni tavoli. La condizione può interessare un'analisi quando i vani sono molto stretti.
| Griglie e distanze |
|
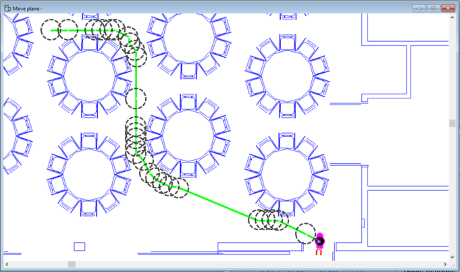
Sulla base di questi calcoli iniziali, in Revit viene generato un percorso preliminare, creando nodi attraverso i punti centrali delle celle lungo il percorso più breve possibile. Il percorso senza ostruzioni più breve viene determinato mediante una forma personalizzata dell'algoritmo A*.
| Percorso preliminare |

|
Identificazione di ostacoli vicini al percorso preliminare
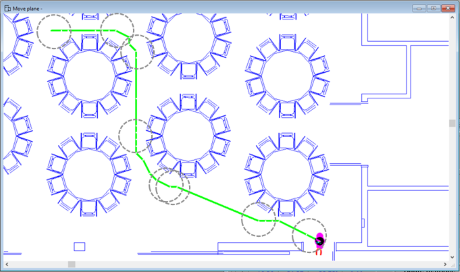
Per generare un percorso ottimale, Revit consente di identificare gli ostacoli in prossimità del percorso preliminare. Per trovare gli ostacoli vicini, viene posizionato un cerchio con raggio di 0.03 metri in corrispondenza di ogni nodo lungo il percorso preliminare. L'intersezione più vicina di un ostacolo con il cerchio viene identificata come punto di snap all'angolo per il percorso modificato.
| Individuazione degli ostacoli vicini |
|
Per acquisire punti di snap all'angolo aggiuntivi, in Revit viene eseguito un altro passaggio lungo il percorso preliminare. In corrispondenza di eventuali nodi in cui i cerchi con raggio di 0,3 metri non intersecavano gli ostacoli, viene utilizzato un cerchio con raggio di 0,566 metri più grande per individuare potenziali ostacoli lontani.
| Individuazione degli ostacoli vicini - 2° passaggio |
|
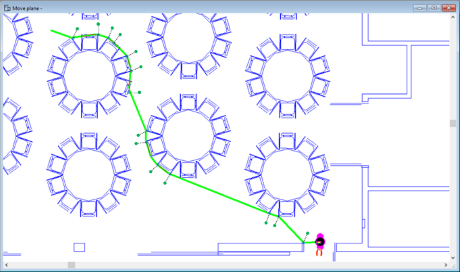
Generazione di un percorso modificato
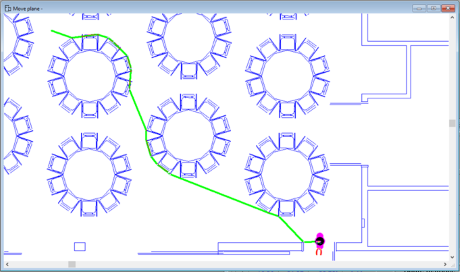
Utilizzando tali punti di snap all'angolo, Revit consente di generare un percorso modificato che segue un percorso il più vicino possibile agli ostacoli lungo il percorso preliminare. Questo percorso modificato diventa la base per la generazione della traiettoria di movimento finale.
| Percorso modificato |
|
Offset della traiettoria di movimento ottimale
Revit consente di eseguire l'offset di ciascun nodo sul percorso modificato ad una distanza di 0,3 metri dall'ostacolo (0,25 metri per il raggio del corpo e 0.05 metri per l'oscillazione corporea). L'offset viene proiettato 90° rispetto agli angoli di ingresso/uscita in corrispondenza del nodo, con un minimo di 30° tra i punti di offset.
| Offset per la larghezza del corpo |
|
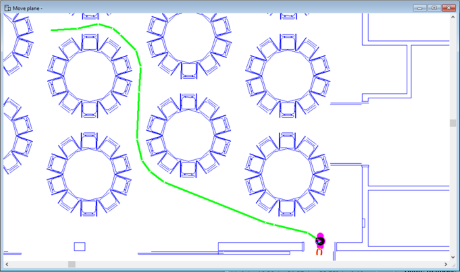
I punti di offset che sono molto vicini tra di loro (a meno di 0,2 metri) vengono uniti per rendere più uniforme il percorso finale. Revit consente di disegnare il percorso ottimizzato finale utilizzando i punti di offset.
| Creazione della traiettoria di movimento finale |
|