Lorsque vous créez une trajectoire de déplacement, Revit analyse la vue active et calcule le chemin optimal (le plus court). Lors des calculs, la trajectoire de déplacement permet d'éviter les catégories identifiées en tant qu'obstacles (définies dans les paramètres) en prenant en compte la largeur d'une personne moyenne et les mouvements du corps en marche.
L'analyse de trajectoire de déplacement s'appuie sur le moteur d'analyse Simulex. Elle est effectuée en quatre étapes :
- Définir une grille et générer un itinéraire préliminaire.
- Trouver les plus proches obstacles le long de l'itinéraire préliminaire.
- Utiliser des points d'accrochage d'angle pour modifier la trajectoire.
- Inclure un décalage par rapport à la trajectoire de déplacement optimale.

Ces étapes constituent le processus interne de l'analyse. Les sections suivantes décrivent les différentes étapes de ligne afin de clarifier la manière dont la ligne de trajectoire est générée.
Générer un itinéraire
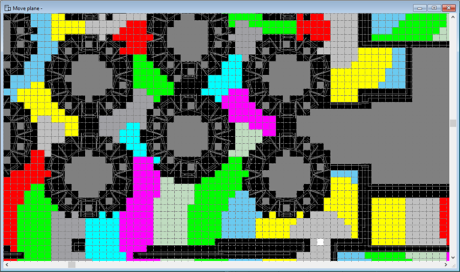
Pour lancer une analyse de trajectoire de déplacement, Revit applique une grille à la vue en plan. La résolution de la grille est fixée à 0,2 mètre. Chaque cellule de la grille se voit attribuer une valeur associée à la distance séparant le point de fin de la trajectoire. Les couleurs sur l'image indiquent les plages de distances.
Les cellules contenant des catégories définies comme des obstacles ne sont plus envisagées (en noir sur l'image). Si une cellule est bordée des deux côtés par ces cellules éliminées, elle cesse également d'être envisagée. L'image suivante illustre ce cas entre certaines tables. Cette situation peut avoir une incidence sur une analyse lorsque les espaces sont très étroits.
| Grilles et distances |
|
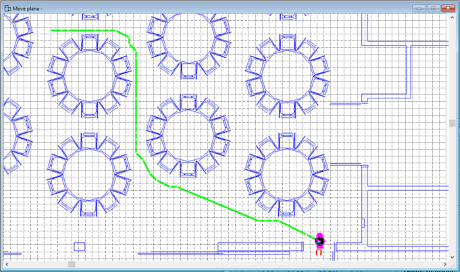
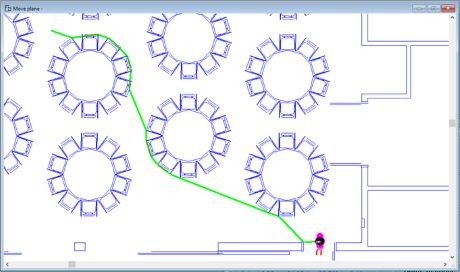
En s'appuyant sur ces premiers calculs, Revit génère une trajectoire préliminaire, en créant des nœuds au milieu des points centraux des cellules situées le long de la trajectoire la plus courte possible. Le chemin le plus court dépourvu d'obstacles est déterminé à l'aide d'une forme personnalisée de l'algorithme A*.
| Trajectoire préliminaire |
|
Identification des obstacles à proximité de la trajectoire préliminaire
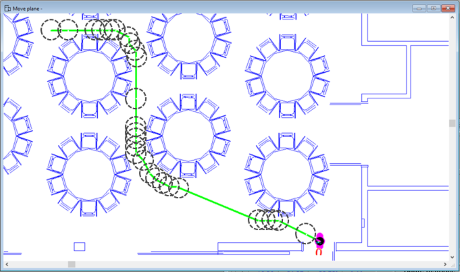
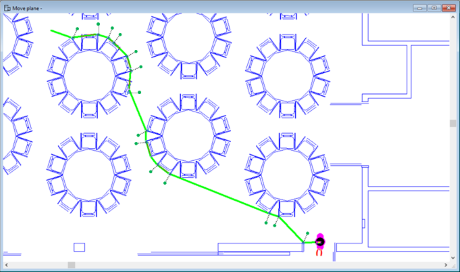
Pour générer une trajectoire plus optimale, Revit identifie les obstacles à proximité de la trajectoire préliminaire. Pour trouver les obstacles à proximité, un cercle d'un rayon de 0,3 mètre est placé au niveau de chaque nœud le long de la trajectoire préliminaire. L'intersection la plus proche d'un obstacle avec le cercle est identifiée comme point d'accrochage d'angle pour la trajectoire modifiée.
| Localisation des obstacles proches |
|
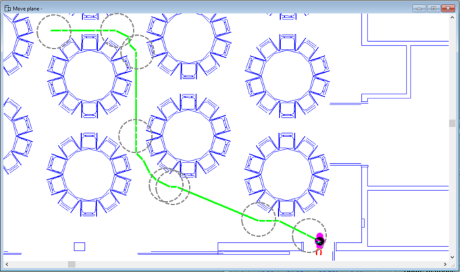
Pour capturer d'autres points d'accrochage d'angle, Revit effectue un autre passage le long de la trajectoire préliminaire. A chaque nœud où le cercle de 0,3 mètre de rayon ne coupe aucun obstacle, un cercle plus grand, de 0,566 mètre de rayon, est utilisé pour rechercher les éventuels obstacles plus éloignés.
| Deuxième passage de localisation des obstacles proches |
|
Génération d'une trajectoire modifiée
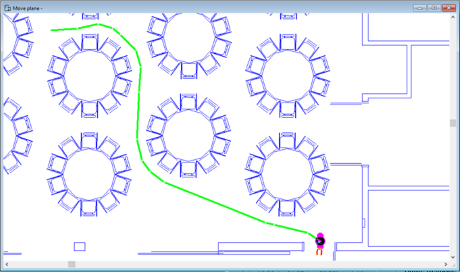
A l'aide de ces points d'accrochage d'angle, Revit génère une trajectoire modifiée qui suit un itinéraire passant aussi près que possible des obstacles le long de la trajectoire. Cette trajectoire modifiée devient la base pour générer la trajectoire de déplacement finale.
| Trajectoire modifiée |
|
Décalage de la trajectoire de déplacement optimale
Revit éloigne chaque nœud sur la trajectoire modifiée de 0,3 mètre de l'obstacle (0,25 mètre pour le rayon du corps et 0,05 mètre pour les mouvements du corps). Chaque nœud décalé est projeté selon un angle de 90° par rapport à l'angle d'entrée et de sortie de la trajectoire au niveau du nœud, avec un minimum de 30° entre les points décalés.
| Décalage pour la largeur du corps |
|
Les points décalés qui sont très proches les uns des autres (moins de 0,2 mètre) sont fusionnés pour lisser la trajectoire finale. Revit permet de tracer la trajectoire optimisée finale à l'aide des points décalés.
| Création de la trajectoire de déplacement finale |
|