当在两足动物的上半身和下半身使用不同的运动时,您可以创造这样一个环境:两个剪辑中的平衡彼此不匹配。例如,如果上半身使用的动画中手臂大幅度摇摆,那么应该补偿一定程序的臀部动画,以保持 Biped 平衡。这种手臂运动与其他臀部/腿部运动的直接混合最有可能造成平衡失调。
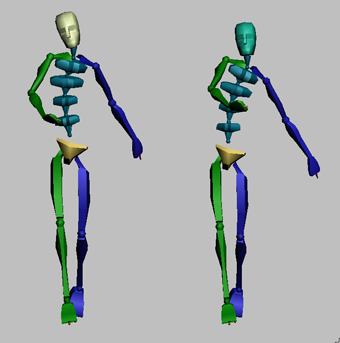
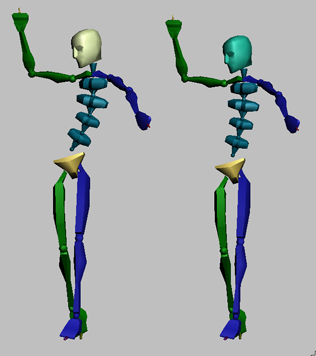
Biped 带有一组相同的上半身和下半身躯干运动。Biped 左侧拥有平衡补偿,而右侧却没有。
默认情况下,混合器通过对脊骨和骨盆运动进行略微改动,以此补偿上半身和下半身运动的差别。例如,如果 Biped 腰部弯曲,则将移动骨盆,以补偿移位,同时减小脊骨旋转角度,以使 Biped 保持平衡。平衡补偿用于使 Biped 运动看上去尽可能自然。
在混合器中,您可以使用平衡轨迹控制自动平衡补偿的程度。在 Biped 添加到混合器时,将为其自动创建一个平衡轨迹。
平衡轨迹
平衡视图拥有一条权重曲线,用于调整上半身和下半身轨迹组之间自动平衡补偿的程度。默认情况下,平衡轨迹上的权重值为 1.0 时可以提供最大的补偿度。您还可以减少各个点上的权重曲线,以降低混合器执行的自动平衡度。
要对平衡补偿进行精细调整,还可以更改“平衡参数”对话框上的参数(可以通过“混合”菜单打开该对话框。
过程
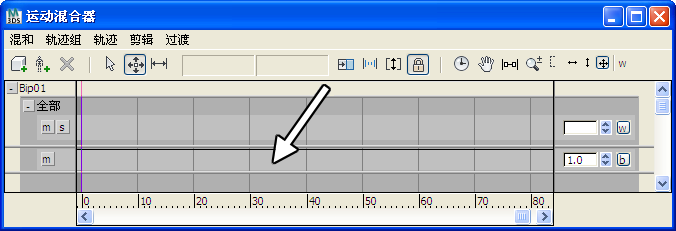
要使用平衡轨迹调整平衡,请执行以下操作:
- 将 Biped 添加到混合器中,然后为其至少创建两个轨迹组。请参见过滤混合器轨迹。
- 过滤一个轨迹组,以只从脊骨、手臂和头部使用动画。请参见过滤混合器轨迹。此轨迹组将保持上半身运动。
- 过滤另一个轨迹组,以只应用于腿部、骨盆和 COM 轨迹。此轨迹组将保持下半身运动。
- 将带有大量上半身运动的剪辑添加到上半身轨迹中。请参见将剪辑导入混合器。
- 将带有截然不同的下半身动画的剪辑添加到下半身轨迹中。
- 单击
 (平衡权重模式)。此按钮在平衡轨迹的最右端。
(平衡权重模式)。此按钮在平衡轨迹的最右端。 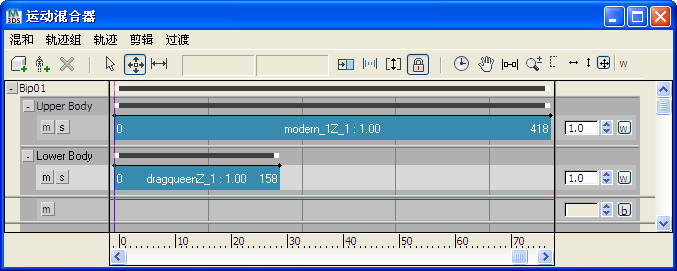
此时可以在平衡轨迹的顶部看到权重曲线。
提示: 如果您未看到权重曲线,请单击“首选项”,以显示“混合器首选项”对话框,然后打开“权重曲线”。 - 将节点添加到权重曲线中,然后调整节点。有关如何添加节点及编辑权重曲线的信息,请参见调整轨迹权重。
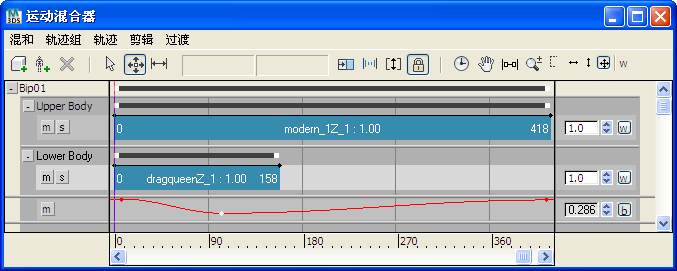
将权重设置为 0.0 之后,混合器并不能调整脊骨和骨盆运动,以补偿上半身和下半身运动的差异。介于 0.0 和 1.0 之间的值可以在一定程度上调整平衡。
要微调骨盆和脊骨上的平衡补偿,请执行以下操作:
- 在运动混合器中,单击 Biped 轨迹组左上角上的名称可将其选中。
- 从运动混合器菜单中,选择“混合”
 “平衡参数”。
“平衡参数”。 显示“平衡参数”对话框。
- 要调整骨盆上水平平衡补偿度,请更改“横向比”参数。值越小就可以对骨盆执行更大幅度的向前/向后运动,而值越大就可以使用更大幅度的左右运动来进行补偿。
- 要调整下半身运动的脊骨旋转在上半身传播的程度,请更改“传播”参数。使用较高的值旋转脊骨链接可以更准确地追随 COM 和骨盆运动。
Biped 带有相同的上半身和下半身运动。Biped 左侧的传播设置为 0.0,而右侧的传播为 1.0。
“平衡参数”对话框上的值可用于对 Biped 的平衡进行精细调整。