![]()
Para tornar o movimento do bípede natural, algumas articulações do bípede estão limitadas à forma como podem ser rodadas, tal como acontece com os cotovelos e os joelhos. Se uma articulação puder ser rodada nos três eixos X, Y e Z, ela possui três graus de liberdade (DOF). O DOF de uma articulação pode ser modificado selecionando-o e, em seguida, definindo opções na implementação Bloqueios do painel de Hierarquia.
A tabela abaixo mostra os graus de liberdade de cada vínculo. A opção Bípede fornece um pouco mais de liberdade que aquilo que a maioria dos corpos humanos é capaz. Todas as rotações são executadas no sistema de coordenadas local.
Para rodar a pelve do bípede nas três dimensões, consulte Pelve como Articulação Esférica.
Restrições de Movimento Bípede
Algumas partes bípedes têm condições especiais que regem a forma como você pode transformá-las, conforme descrito na tabela e nas seções a seguir.
| Vínculo Bípede | Nome do vínculo | Eixos Livres | Comentários |
|---|---|---|---|
| Centro de massa | Bip001 (padrão) | X, Y, Z | Roda todo o bípede |
| Pelve | Pelve | X, Y, Z | Se os pés estiverem assentes no chão, ajusta as pernas para manter os pés e os dedos dos pés acima do chão |
| Cabeça | Cabeça | X, Y, Z | |
| Pescoço | Pescoço | X, Y, Z | A orientação do pescoço não afeta a orientação da cabeça |
| Spline | Espinha, Espinha1-4 | X, Y, Z | A rotação da espinha ajusta o equilíbrio geral |
| Extremidade | Cauda, Cauda1-4 | X, Y, Z | |
| Clavicles | Braço D, Braço E | Y, Z | A orientação dos ombros não afeta a orientação das clavículas |
| Ombros (parte superior do braço) | Parte superior do braço D, Parte superior do braço E | X, Y, Z | Rodando os pontos de giro do ombro ao pulso |
| Cotovelos (parte inferior do braço) | Antebraço D, Antebraço E | X, Z | Articulação mais rotação especial |
| Ancas (parte superior da perna) | Coxa D, Coxa E | X, Y, Z | Rodando os pontos de giro da anca ao tornozelo |
| Joelhos (parte inferior da perna) | Panturrilha D, Panturrilha E | X, Z | Articulação mais rotação especial |
| Mãos | Mão D, Mão E | X, Y, Z | |
| Pés | Pé D, Pé E | X, Y, Z | Se os pés estiverem assentes no chão, ajusta as pernas para manter os pés e os dedos dos pés acima do chão |
| Dedos | Dedo0, 01, 02 Dedo1, 11, 12, etc. | X, Y, Z | As bases dos dedos têm três eixos livres; as outras articulações dos dedos apenas têm o eixo Z |
| Toes | Dedo do pé0, 01, 02 Dedo do pé1, 11, 12, etc. | X, Y, Z | As bases dos dedos dos pés têm três eixos livres; as outras articulações dos dedos dos pés apenas têm o eixo Z |
Pelve como Articulação Esférica
A pelve pode ser rodada nos três eixos: X, Y e Z. Esta articulação esférica fornece três graus de liberdade, aumentando a flexibilidade de animação com um bípede, pois as rotações da pelve estão isoladas da rotação do centro de massa (COM). Isso faz com que o COM assuma uma trajetória mais suave, o que também influencia a cabeça e os braços do bípede. Como resultado, eles parecerão mais naturais se movendo no espaço rotacional do COM do corpo.
É importante estar ciente das seguintes alterações comportamentais resultantes deste aspecto:
- O movimento da pelve com três DOFs é exibido como três funções de curva Euler ou quaterno (TCB) separadas no Editor de Curva e no Workbench.
- Usar a redução chave na espinha do bípede produz resultados melhores.
- As rotações nos novos eixos pélvicos (X e Z) são animáveis em camadas e compatíveis com MAXScript.
- A animação de passos paramétrica padrão está ligeiramente ajustada para usar a pelve com três DOFs.
- Se um ativo bípede de legado como um arquivo BIP for carregado no bípede do 3ds Max, os dados relacionados à pelve serão adaptados para os novos DOFs e o novo espaço de coordenadas dentro do qual a pelve é rodada.
- Usando o Motion Mixer ou Fluxo de Movimento, ativos contendo novas trilhas de rotação pélvica serão mesclados com ativos antigos sem estas trilhas.
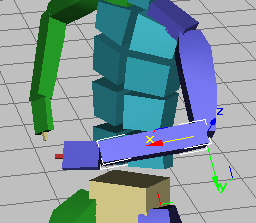
Rotação Especial: Cotovelos e Joelhos
Os Cotovelos e Joelhos executam uma rotação especial quando vocês os roda em torno de seu eixo X. Na verdade, eles não rodam em torno de seu eixo X; isso não faz sentido pois eles têm um grau de liberdade. Em vez disso, a parte superior e inferior do braço/perna é rodada em conjunto em torno de um eixo invisível definido pela linha que vai desde o ombro até ao pulso e da anca até ao tornozelo. Esta rotação especial pode ser muito útil para posicionar os braços e as pernas.
A rotação especial também pode ser útil para criar personagens com dobras de joelho invertidas. Quando os joelhos são rodados para trás, com uma rotação superior a 90 graus a partir da postura frontal de um joelho humano, a opção Bípede assume que o personagem tem joelhos ao contrário ou pernas de pássaro e usa esta posição como uma referência para todosos movimentos .bip.
Rodar o antebraço ao longo do eixo X roda os elementos do braço em torno de um eixo invisível entre o ombro e o pulso.
Equilíbrio: Espinha
A opção Bípede apenas usa a espinha, em conjunto com o centro de massa, para manter o equilíbrio do bípede. Por isso, rodar toda a espinha ou qualquer um de seus vínculos faz com que a posição horizontal do corpo mude em relação ao seu centro de massa. Estes ajustes são executados no sistema de coordenadas de referência local do centro de massa, garantindo que a figura rode naturalmente em torno de seu centro de massa; por exemplo, durante voltas no ar.
Na implementação Informações Importantes do painel de Movimento, é possível desativar esse comportamento definindo o Fator de Equilíbrio de 0,0 para as chaves de centro de massa horizontal correspondentes. O controle Fator de Equilíbrio está no grupo Corpo da implementação.
Orientação Independente: Braços, Cabeça, Pés
Alterar a orientação de uma clavícula (o objeto Braço raiz) altera a posição, mas não a orientação, de seu braço superior correspondente. Em efeito, as clavículas são um suporte a partir do qual os braços estão suspensos.
Da mesma forma, a orientação do pescoço altera a posição, mas não a orientação, da cabeça. Embora vinculada ao pescoço, a cabeça roda normalmente de forma independente do pescoço e a interpolação destas orientações definidas individualmente gera um movimento mais natural.
Semelhante à cabeça e aos braços, alterar a orientação da parte superior ou inferior da perda muda a posição, mas não a orientação, do pé correspondente. Desta forma, a orientação do pé permanece relativa ao plano de chão.
Ajustar Chaves com Rotação TCB
Em vez de criar chaves adicionais para ajustar o movimento dos membros bípedes, você pode usar os controles TCB para ajustar a facilidade de entrada, a facilidade de saída e a trajetória dos membros nas chaves que já existem.
Visualizando Animações de Rotação com Funções de Curva
Outro método para visualizar a animação de rotação é através do Editor de Curva. Cada chave que você adiciona é exibida e conectada a outras chaves, criando uma curva que representa sua animação. Você pode usar o Controlador de Rotação TCB ou o Controlador XYZ Euler(na implementação Euler/Quaterno) para exibir sua curva de rotação como Quaterna ou Euler, respectivamente. Cada controlador afeta a curva de forma diferente com base em diferentes cálculos de rotação. Para saber mais sobre este aspecto, consulte Trabalhando com Curvas Euler em Animação Bípede.

Curva de Rotação da Tangente Euler
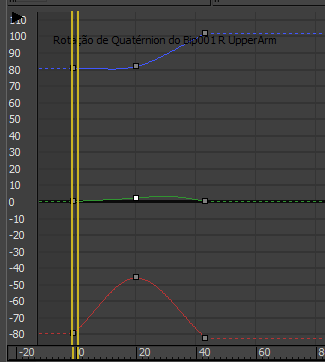
Curva de Rotação Quaterna
Procedimentos
Para alterar TCB para um braço bípede:
- Sobre a implementação de informações da chave, ative
 (Trajetórias).
(Trajetórias). -
 Selecione um braço bípede.
Selecione um braço bípede. - Use
 (Próxima Chave) ou
(Próxima Chave) ou  (Chave Anterior) para localizar uma chave do braço.
(Chave Anterior) para localizar uma chave do braço. - Se o grupo de TCB ainda não for exibido, clique no divisor TCB.
- Altere os controles giratórios Tensão, Continuidade e Desvio.
A trajetória muda para refletir os novos parâmetros. Reproduza a animação para ver a alteração.
Dica: Você também pode acessar os controles TCB clicando com o botão direito na barra de acompanhamento, Vista de trilha – Editor de Curva ou Vista de Curva do Workbench.