ツールパス コネクター ダイアログ 安全領域 タブのオプションを使用し、工具が早送りで移動可能な安全領域のサイズ、および、形状を指定します。早送りの速度は、送り/速度 ダイアログで指定されます。これにより、工具は 2 ポイント間を最短時間で移動することができます。
一般的に、早送り移動は、以下の 3 つの移動で行われます。
- 最終加工ポジションから安全 Z 領域までの上昇移動
- 新規加工開始ポジションまでの等高線の横移動
- 新規開始 Z 高さまでの降下移動
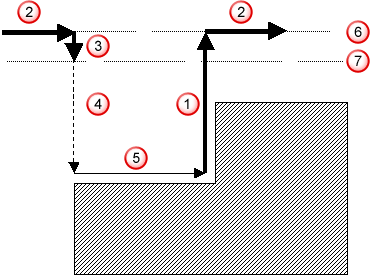
 早送りの上昇移動
早送りの上昇移動
 早送りの横移動
早送りの横移動
 早送りの降下移動
早送りの降下移動
 プランジ送り速度のプランジ動作
プランジ送り速度のプランジ動作
 加工送り速度の加工移動
加工送り速度の加工移動
 安全 Z
安全 Z
 開始 Z
開始 Z
このタブには、以下の設定が表示されます。
安全領域
この領域のオプションは、絶対移動で工具が早送り移動になる場所とタイミングを指定します。
タイプ - 早送りが許容される安全領域の形状を指定します。
作業平面 - ツールパス作業平面と異なる場合、安全領域の定義に作業平面を使用します。安全領域に達するまで工具軸は固定されたままになります。安全領域のサーフェス上を工具が移動する場合のみ、再方向付けが可能です。
法線 - 早送りを実行する平面に垂直になる方向を入力します。このオプションは、タイプ から 平面 を選択すると有効になります。
ポジション - 安全領域を定義する、円筒の軸沿いのポイントの座標を入力します。このオプションは、タイプ から 円筒 を選択すると有効になります。
方向 - 早送りを実行する平面に垂直になる方向を入力します。このオプションは、タイプ から 円筒 を選択すると有効になります。
中心 - 球の中心を入力し、安全領域を定義します。このオプションは、タイプ から 球 を選択すると有効になります。
コーナー - ボックスのコーナーの座標を入力します。このオプションは、タイプ から 最大 / 最小寸法 を選択すると有効になります。
寸法 - ボックスの長さ、高さ、幅を入力します。このオプションは、タイプ から 最大 / 最小寸法 を選択すると有効になります。
 - 方向 ダイアログを表示します。このダイアログを使用し、アイテム方向を編集します。このオプションは、タイプ から 平面、または、円筒 を選択すると有効になります。
- 方向 ダイアログを表示します。このダイアログを使用し、アイテム方向を編集します。このオプションは、タイプ から 平面、または、円筒 を選択すると有効になります。
 - ポジション ダイアログを表示します。このダイアログに座標を入力し、グラフィックウィンドウからアイテムを検出することができます。 このオプションは、タイプ から 円筒、または、最大 / 最小寸法、球 を選択すると有効になります。
- ポジション ダイアログを表示します。このダイアログに座標を入力し、グラフィックウィンドウからアイテムを検出することができます。 このオプションは、タイプ から 円筒、または、最大 / 最小寸法、球 を選択すると有効になります。
早送り高さ - ワークピース上で早送り移動が実行される前に、工具がリフトされる Z の等高レベルを入力します。 このオプションは、タイプ から 平面 を選択した場合のみ有効になります。
プランジ高さ - ワークピースの加工前に、工具が早送りで降下を開始する Z の絶対座標値を入力します。 このオプションは、タイプ から 平面 を選択した場合のみ有効になります。
極座標リンク使用 - 平坦安全領域を横切るパスは、極座標切削に基づいて定義されます。このオプションは、タイプ から 平面 を選択すると有効になります。
早送り半径 - 円筒状、または、球状の安全領域の半径を入力します。 このオプションは、タイプ から 円筒、または、球 を選択した場合のみ有効になります。
プランジ半径 - 絶対プランジ動作の実行元になる円筒、または、球の半径を入力します。 このオプションは、タイプ から 円筒、または、球 を選択した場合のみ有効になります。
プランジオフセット - ボックス形状の安全領域を基準に、プランジサーフェスのポジションを入力します。 このオプションは、タイプ から 最大 / 最小寸法 を選択した場合のみ有効になります。
ポリゴン化トレランス - 値を入力し、円弧動作のポリゴン化に使用するトレランスを定義します。これにより、円筒状、または、球状サーフェスからの最大偏差が定義されます。 このオプションは、タイプ から 円筒、または、球 を選択した場合のみ有効になります。
有限長さ - 指定長の円筒状安全領域を定義します。 このオプションは既定で無効となっており、タイプ から 円筒 を選択した場合のみ有効になります。
- 長さ - 値を入力し、円筒の長さを定義します。
- フェース - 最小 オプションと 最大 オプションを切り替え、早送り移動が許容されるフェースを指定します。円筒の開始フェースと終了フェースは、軸方向に対して定義されます。
含めるフェース - このセクションのオプションを切替え、早送り移動が許容されるボックスの側面を指定します。 このオプションは、タイプ から 最大 / 最小寸法 を選択した場合のみ有効になります。
増分
この領域のオプションは、増分移動で工具が早送り移動になるタイミングを指定します。
測定元 - リストからオプションを選択し、安全領域、および、プランジサーフェスが計算される参照フレームを定義します。
- ブロック / モデル - ブロックとモデルの組合せの最大 / 最小寸法リミット、または、円筒状リミットを基準に安全領域を定義します。ブロックが円筒状で、モデルの最大 / 最小寸法リミットを含んでいる場合、円筒状リミットが使用されます。
- ブロック - ブロックの最大/最小寸法、または、円筒状リミットを基準に安全領域を定義します。
- モデル - モデルの最大/最小寸法リミットを基準に、安全領域を定義します。
- マシン - マシンの線状移動リミット内に配置されるように、安全領域を定義します。ツールパスに対してマシンが未定義の場合、このオプションは無効になります。
マシン - リストからマシンを選択します。
モデルロケーション - マシン座標系にアラインする作業平面を選択します。これにより、マシンに相対してパーツの方向を指定します。 これらのオプションは、[測定元] から マシン を選択した場合にのみ有効になります。
早送りクリアランス - 安全領域 に必要なブロック、および、モデルからのクリアランスを入力します。このクリアランスが、プランジクリアランス と共に指定されます。 このオプションは、[測定元] から ブロック/モデル、ブロック、モデル のいずれかを選択した場合にのみ有効になります。
早送り内側クリアランス - マシンの線状移動リミット内の、早送りサーフェスのクリアランスを指定します。 このオプションは、[測定元] から マシン を選択した場合にのみ有効になります。
プランジクリアランス - ブロック、および、モデルからのクリアランスを入力します。これは、プランジ動作の開始時に使用されます。 このオプションは、[測定元] から ブロック/モデル、ブロック、モデル のいずれかを選択した場合にのみ有効になります。
プランジ内側クリアランス - マシンの線状移動リミット内の、プランジサーフェスのクリアランスを指定します。 このオプションは、[測定元] から マシン を選択した場合にのみ有効になります。
計算 - ブロック、および、モデルから指定されたクリアランスの取得に必要な安全領域の寸法を計算します。平面が Z 軸に垂直になるように タイプ から 平面 を選択すると、以下のようになります。
- 早送り高さ = ブロックリミット最大 Z + 早送りクリアランス + プランジクリアランス
- プランジ高さ = ブロックリミット最大 Z + プランジクリアランス
表示オプション
早送りサーフェス表示 - 安全領域のサーフェスを表示します。スライダーを使用し、早送りサーフェスの透明度を設定します。
プランジサーフェス表示 - 早送り移動を行うサーフェスを表示します。これは、アプローチ動作がプランジ速度で行われる超過領域を指します。 スライダーを使用し、当該サーフェスの透明度を設定します。
ガウジチェック - ツールパスコネクターのガウジ、および、干渉チェックの有無を指定します。
安全領域適用 - 変更を保存し、安全領域、および、安全領域から定義された全移動の再計算を行います。