이동 경로를 작성할 때 Revit은 현재 뷰를 해석하여 최적(최단)의 경로를 계산합니다. 계산 시 이동 경로는 장애물(설정에서 정의됨)로 식별된 카테고리를 피하고, 일반적인 사람의 몸 크기와 걷을 때 몸의 흔들림을 고려합니다.
이동 경로 해석은 Simulex 해석 엔진을 기반으로 합니다. 이 작업은 다음 4가지 단계로 수행됩니다.
- 그리드를 정의하고 예비 경로를 생성합니다.
- 예비 경로를 따라 가장 가까운 장애물을 찾습니다.
- 코너 스냅 점을 사용하여 수정된 경로를 생성합니다.
- 장애물로부터 간격띄우기를 수행하여 최적의 "걷기" 경로를 생성합니다.

이러한 단계는 해석의 내부 프로세스입니다. 다음 섹션에서는 경로 선을 생성하는 방법을 명확하게 나타내기 위한 단계를 설명합니다.
경로 생성
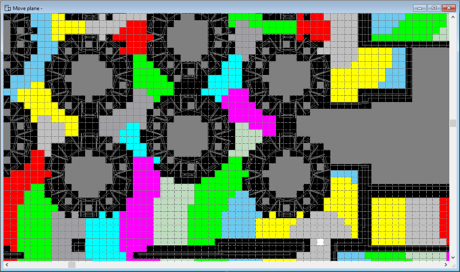
이동 경로 해석을 시작하기 위해 Revit은 그리드를 평면도에 적용합니다. 그리드 해상도는 0.2미터로 고정되어 있습니다. 각 그리드 셀에는 경로의 끝점으로부터의 거리와 관련된 값이 지정됩니다. 이미지의 색상은 거리 범위를 나타냅니다.
장애물로 정의된 카테고리가 포함된 셀은 고려 대상에서 제거됩니다(이미지에서 검은색으로 표시됨). 셀이 이러한 제거된 셀과 2개의 측면에서 접해 있는 경우 해당 셀도 고려 대상에서 제거됩니다. 다음 이미지는 일부 테이블에서의 이 조건을 보여줍니다. 이 조건은 공간이 매우 좁을 경우 해석에 영향을 줄 수 있습니다.
| 그리드 및 거리 |
|
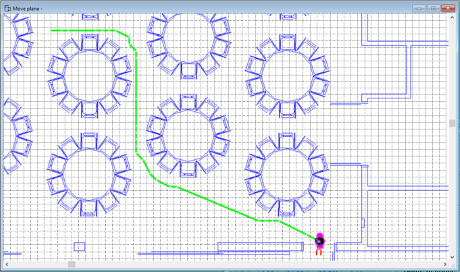
이러한 초기 계산을 바탕으로 Revit은 가능한 최단 경로를 따라 셀의 중심점을 연결한 노드를 작성하여 예비 경로를 생성합니다. 장애물이 없는 가장 짧은 경로는 사용자 지정 형식의 A* 알고리즘으로 결정됩니다.
| 예비 경로 |
|
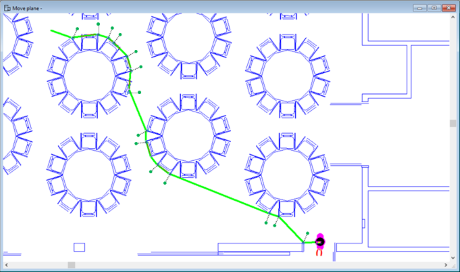
예비 경로 근처의 장애물 식별
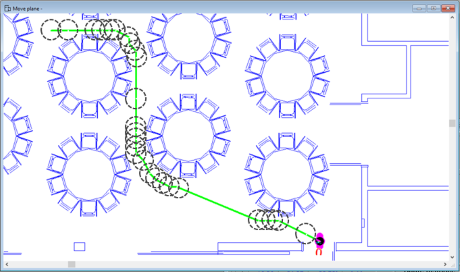
더 최적화된 경로를 생성하기 위해 Revit은 예비 경로 근처의 장애물을 식별합니다. 가까운 장애물을 찾기 위해 0.3미터의 반지름 원이 예비 경로를 따라 각 노드에 배치됩니다. 원과 장애물을 교차하는 가장 가까운 지점이 수정된 경로의 코너 스냅 점으로 식별됩니다.
| 가까운 장애물 찾기 |
|
추가 코너 스냅 점을 캡처하기 위해 Revit에서는 예비 경로를 따라 다른 통과 작업을 수행합니다. 0.3미터의 반지름 원이 장애물을 교차하지 않는 임의의 노드에서는 더 멀리 떨어져 있는 잠재적인 장애물을 찾기 위해 더 큰 0.566미터의 반지름 원이 사용됩니다.
| 두 번째로 통과하는 가까운 장애물 찾기 |
|
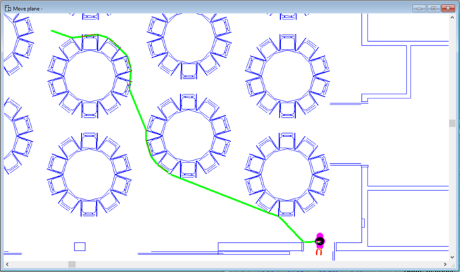
수정된 경로 생성
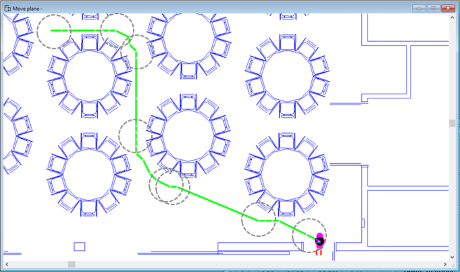
이러한 코너 스냅 점을 사용하여 Revit은 예비 경로를 따라 가능한 한 장애물에 가깝게 지나가는 수정된 경로를 생성합니다. 이 수정된 경로는 최종 이동 경로를 생성하기 위한 기초가 됩니다.
| 수정된 경로 |
|
최적의 이동 경로 간격띄우기
Revit은 수정된 경로의 각 노드를 장애물로부터 0.3미터 간격띄우기를 합니다(본체 반지름의 경우 0.25미터, 본체 흔들림의 경우 0.05미터). 간격띄우기는 진입/출구 각도에도 노드로 90°로 적용되며, 간격띄우기 점 사이에서 최소값은 30°입니다.
| 몸 크기 간격띄우기 |
|
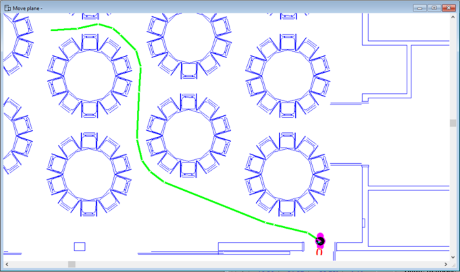
서로 매우 가까이(0.2미터 미만)에 있는 간격띄우기 점은 최종 경로를 부드럽게 만들기 위해 병합됩니다. Revit이 간격띄우기 점을 사용하여 최적화된 최종 경로를 그립니다.
| 최종 이동 경로 작성 |
|