教程:形状优化分析
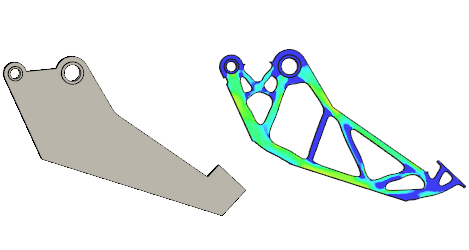
本教程演示如何对机器人夹持臂执行形状优化分析,以减小其重量和节省材料成本。夹持臂由钢制成,旨在承受抓取面上的压缩载荷。很重要的一点是,新设计符合原始设计规范,并对应用的载荷保持至少为 2.0 的安全系数。
在本教程中,您将完成以下任务:
创建形状优化分析以优化机器人夹持臂的形状,并将材料减少 40%
应用约束和载荷以保持原始设计的重要方面
定义形状优化标准并运行形状优化分析
在“设计”工作空间中根据形状优化网格对象修改原始设计
运行静态应力分析以检查新设计是否符合设计规范。
本教程演示如何对机器人夹持臂执行形状优化分析,以减小其重量和节省材料成本。夹持臂由钢制成,旨在承受抓取面上的压缩载荷。很重要的一点是,新设计符合原始设计规范,并对应用的载荷保持至少为 2.0 的安全系数。
在本教程中,您将完成以下任务:
创建形状优化分析以优化机器人夹持臂的形状,并将材料减少 40%
应用约束和载荷以保持原始设计的重要方面
定义形状优化标准并运行形状优化分析
在“设计”工作空间中根据形状优化网格对象修改原始设计
运行静态应力分析以检查新设计是否符合设计规范。