Actividad 2: Definir las restricciones de modelado
En esta actividad, define las restricciones de modelado para garantizar que el diseño de optimización de formas cumpla ciertas expectativas de diseño.
Un robot utiliza el brazo de agarre, con uno o más brazos, para capturar objetos. El nuevo diseño de brazo debe poder levantar y mover el mismo peso. El brazo se mantiene en su lugar mediante dos pasadores y esta restricción debe tenerse en cuenta durante la simulación. Estas dos áreas del brazo, los agujeros de perno de los pasadores y la cara de agarre del brazo, deben conservarse en el nuevo diseño. Además, desea que el nuevo diseño sea simétrico a través del grosor, como el diseño original.
En esta actividad:
- Utilizará restricciones de pasador para restringir el modelo con fines de simulación
- Aplicará una carga en la superficie de agarre para garantizar que el diseño pueda manejar cargas de compresión
- Mantendrá el material alrededor de los dos agujeros de perno para asegurarse de que los pasadores funcionen según lo previsto.
- Creará un plano de simetría a través del grosor para que el nuevo diseño sea simétrico a través del grosor como el diseño original.
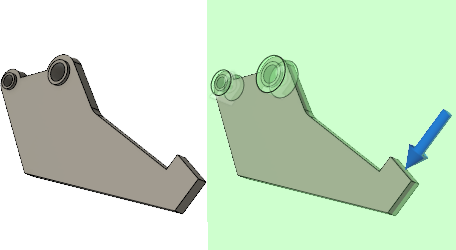
Armario de agarre antes de aplicar restricciones de modelado (izquierda) y con restricciones de modelado aplicadas (derecha).
Requisitos previos
- Actividad 1 completada.
Pasos
Aplique Restricciones de pasador a la superficie interior de cada uno de los agujeros de perno, en las direcciones Radial y Axial.
- Haga clic en
 (espacio de trabajo Simulación > ficha Configuración > panel Restricciones > Restricciones estructurales) para abrir el cuadro de diálogo Restricciones estructurales.
(espacio de trabajo Simulación > ficha Configuración > panel Restricciones > Restricciones estructurales) para abrir el cuadro de diálogo Restricciones estructurales. - Defina el Tipo en
 Pasador.
Pasador. - Seleccione la superficie interior de cada uno de los dos agujeros de perno, como las dos Caras de destino.
- Asegúrese de que las direcciones
 Radial y
Radial y  Axial estén seleccionadas.
Axial estén seleccionadas.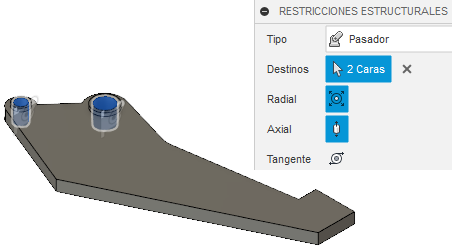
- Haga clic en Aceptar para aceptar los comandos y cerrar el cuadro de diálogo Restricciones estructurales.
- Haga clic en
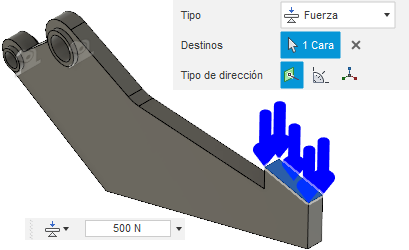
Aplique una Fuerza de 500 N, en la dirección Normal, en la superficie de pinzamiento. El robot utiliza el brazo de agarre para agarrar objetos. La forma que genere debe gestionar las cargas de compresión en la superficie de pinzamiento.
- Haga clic en
 (espacio de trabajo Simulación > ficha Configuración > panel Cargas > Cargas estructurales), para abrir el cuadro de diálogo Cargas estructurales.
(espacio de trabajo Simulación > ficha Configuración > panel Cargas > Cargas estructurales), para abrir el cuadro de diálogo Cargas estructurales. - En el cuadro de diálogo Cargas estructurales, establezca el Tipo en
 Fuerza y el Tipo de dirección en
Fuerza y el Tipo de dirección en  Normal.
Normal. - Haga clic en la superficie de pinzamiento para seleccionarla como Cara de destino.
- Introduzca una carga de 500 N.
- Asegúrese de que la carga actúe en compresión (apuntando hacia la superficie) y haga clic en Aceptar.
- Haga clic en
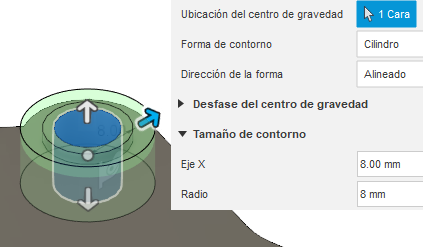
Mantenga 8 mm de material alrededor del agujero de perno grande y 5,5 mm de material alrededor del pequeño, de modo que los pasadores puedan funcionar de la forma esperada. Los dos pasadores mantienen el brazo de agarre en su lugar.
- Haga clic en
 (espacio de trabajo Simulación > ficha Configuración > panel Optimización de formas > Conservar región) para abrir el cuadro de diálogo Conservar región.
(espacio de trabajo Simulación > ficha Configuración > panel Optimización de formas > Conservar región) para abrir el cuadro de diálogo Conservar región. - Si ha cambiado el punto de vista del modelo desde que lo abrió, haga clic en
 Inicio encima de ViewCube, para restaurar la vista isométrica por defecto.
Inicio encima de ViewCube, para restaurar la vista isométrica por defecto. - Haga clic en la superficie interior del agujero de perno grande para seleccionarlo como Cara de ubicación de centroide.
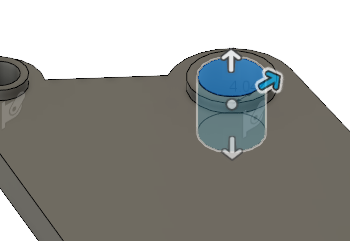
- Ajuste el Radio a 8 mm.
- Haga clic en Aceptar para aceptar el comando y cerrar el cuadro de diálogo Conservar región.
- Repita los pasos de la A a la E para el agujero de perno pequeño, ajustando el radio a 5,5 mm.
- Haga clic en
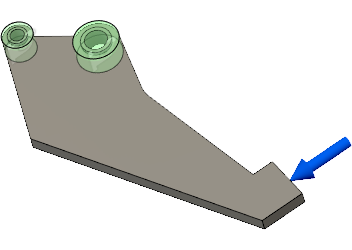
Cree un plano de simetría a través del grosor para que el nuevo diseño sea simétrico a través del grosor como el diseño original del brazo de agarre.
- Haga clic en
 (espacio de trabajo Simulación > ficha Configuración > panel Optimización de formas > Plano de simetría) para abrir el cuadro de diálogo Plano de simetría.
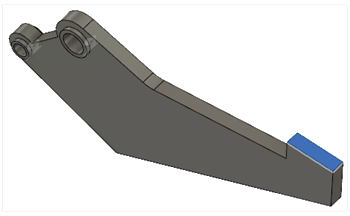
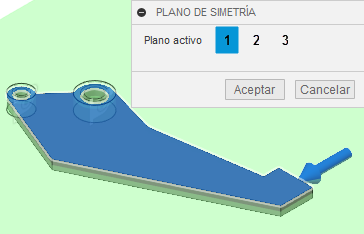
(espacio de trabajo Simulación > ficha Configuración > panel Optimización de formas > Plano de simetría) para abrir el cuadro de diálogo Plano de simetría. - Seleccione la superficie superior del brazo de agarre.
- Haga clic en Aceptar para aceptar el comando y cerrar el cuadro de diálogo Plano de simetría.
- Haga clic en
Resumen de la actividad 2
En esta actividad:
- Se han utilizado restricciones de pasador para restringir el modelo con fines de simulación
- Se ha aplicado una carga en la superficie de agarre para garantizar que el diseño pueda manejar cargas de compresión
- Se ha mantenido el material alrededor de los dos agujeros de perno para asegurarse de que los pasadores funcionen según lo previsto.
- Se ha creado un plano de simetría a través del grosor para que el nuevo diseño sea simétrico a través del grosor como el diseño original.