Exercice 3 : contrainte du bloc poussoir
Dans cet exercice, vous spécifiez le mouvement du bloc poussoir. Vous souhaitez que le bloc poussoir pousse la dalle en acier dans le rouleau, mais vous ne souhaitez pas que le bloc poussoir même touche le rouleau. En revanche, vous préférez que le bloc poussoir pousse la dalle en acier assez loin dans le rouleau pour que le frottement entre la dalle et le rouleau puisse tirer la dalle complètement.
Pour que le bloc poussoir n’ait aucun impact sur le rouleau, il doit cesser de se déplacer avant d’atteindre le rouleau. Dans l’exercice 2, vous avez défini la Durée de l’événement sur 0,002 s. Pour vous assurer que le bloc poussoir n’a pas d’impact sur le rouleau, spécifiez une vitesse constante de 0,0005 s, puis réduisez la vitesse jusqu’à zéro au cours des 0,0005 s suivantes. Avec cette spécification de vitesse, le bloc s’arrête à la moitié de la simulation.
Dans cet exercice, vous définissez des contraintes structurelles fixes sur 5 degrés de liberté sur le bloc poussoir, de sorte qu’il ne puisse se déplacer que dans la direction X. Vous devez ensuite définir la vitesse du bloc poussoir pour qu’il pousse la dalle en acier dans le rouleau sans toucher le rouleau même.
Pour spécifier le mouvement du bloc poussoir vous allez
- Appliquer une contrainte structurelle fixe au bloc poussoir dans toutes les directions sauf la direction X
- Déterminer la vitesse nécessaire sur le bloc poussoir
- Appliquer la vitesse imposée au bloc poussoir afin qu'il se déplace dans la direction +X
- Définir la courbe de multiplicateur qui contrôle la vitesse de translation imposée du bloc poussoir, de sorte qu'il s'arrête avant de toucher le rouleau.
Conditions préalables
- L’exercice 2 est terminé.
Étapes
Définissez des contraintes structurelles pour fixer le bloc poussoir sur cinq degrés de liberté : Uy, Uz, Rx, Ry et Rz, pour empêcher qu’il se déplace dans toutes les directions sauf X.
Cliquez sur
 (espace de travail Simulation > onglet Configuration > panneau Contraintes > Contraintes structurelles) pour ouvrir la boîte de dialogue Contraintes structurelles.
(espace de travail Simulation > onglet Configuration > panneau Contraintes > Contraintes structurelles) pour ouvrir la boîte de dialogue Contraintes structurelles.Vérifiez que le Type de contrainte est défini sur Fixe.
Cliquez sur le bloc poussoir pour le sélectionner en tant que Cible.
Remarque : puisqu’il s’agit d’un corps rigide, le corps entier est sélectionné lorsque vous cliquez sur une arête ou une face.Notez que trois degrés de liberté de rotation apparaissent dans la boîte de dialogue Contraintes structurelles en plus du degré de liberté de translation habituel. Les éléments appartenant aux corps rigides prennent en charge six degrés de liberté.
Vérifiez que les options Ux, Uy, Uz, Rx, Ry et Rz Axe sont toutes activées, comme indiqué par la mise en surbrillance bleue, puis cliquez sur Ux pour les désélectionner.
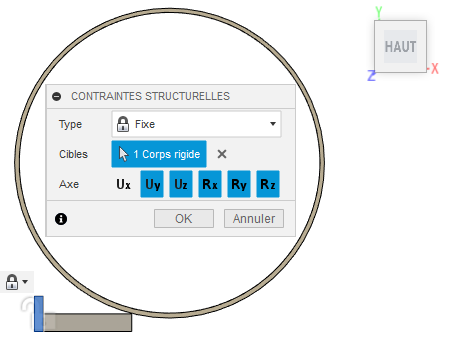
Cliquez sur OK pour définir les contraintes et fermer la boîte de dialogue.
Déterminez la vitesse à appliquer au bloc poussoir, étant donné que la vitesse tangentielle du rouleau est de 55 000 mm/s et que l’épaisseur du bloc d’acier est réduite de 25 % à sa sortie.
- La vitesse tangentielle sortant du rouleau est supérieure à la vitesse de la matière entrant dans la zone de processus, car la coupe est réduite de 25 %.
- La conservation de la masse nécessite une vitesse initiale sur le bloc poussoir, qui correspond à 75 % de la vitesse de sortie. Si vous poussez la dalle plus rapidement que cela, vous la forcerez dans le rouleau plus rapidement que la matière ne peut être déployée du côté opposé.
- (75/100) * 55000 mm/s = ~ 41000 mm/s
Imposez une vitesse de 41 000 mm/s sur le bloc poussoir dans la direction +X.
Cliquez sur
 (espace de travail Simulation > onglet Configuration > panneau Contraintes > Translation imposée) pour ouvrir la boîte de dialogue Translation imposée.
(espace de travail Simulation > onglet Configuration > panneau Contraintes > Translation imposée) pour ouvrir la boîte de dialogue Translation imposée.Cliquez sur le bloc poussoir dans la zone de dessin pour l’identifier comme la sélection.
Remarque : comme vous avez identifié le bloc poussoir comme un corps rigide, le corps entier est sélectionné automatiquement.Définissez le type de contrainte sur Vitesse.
Sélectionnez le Composant Ux pour définir la direction.
Cliquez sur
 Modifier les unités et remplacez les unités par mm/s.
Modifier les unités et remplacez les unités par mm/s.Définissez la magnitude sur 41 000 mm/s.
Remarque : une flèche verte s’affiche pour indiquer la direction de la vitesse imposée.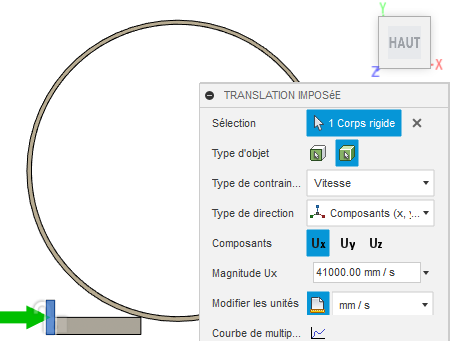
Définissez le mouvement du bloc poussoir, de sorte qu’il se déplace à 41 000 mm/s pour la première 0,005 s et qu’il descende à 0 mm/s durant la 0,0005 s suivante.
Dans la boîte de dialogue Translation imposée, cliquez sur
 Courbe de multiplicateur pour ouvrir la boîte de dialogue Courbe de multiplicateur.
Courbe de multiplicateur pour ouvrir la boîte de dialogue Courbe de multiplicateur.Dans la partie droite de la boîte de dialogue, saisissez 1 comme multiplicateur à Heure 0 afin que le corps du poussoir se déplace à 41 000 mm/s au début.
Sur la ligne 2, dans la colonne Temps, saisissez 0,0005 et définissez de nouveau le Multiplicateur sur 1 afin que le corps du poussoir se déplace à 41 000 mm/s pour la première 0,0005 s.
Sur la ligne 3, dans la colonne Temps, saisissez 0,001 et définissez le multiplicateur sur 0 afin que le corps du poussoir ralentisse et s’arrête au cours de la 0,0005 s suivante.
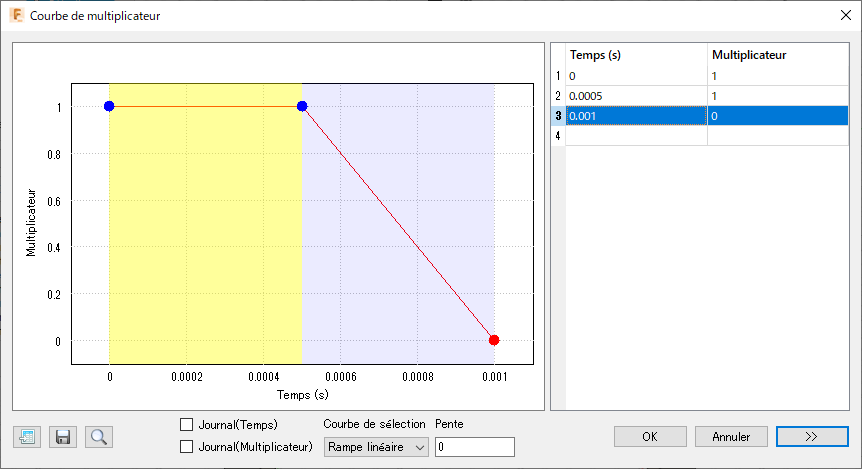
Cliquez sur OK pour accepter la courbe.
Cliquez sur OK pour appliquer la translation imposée et fermer la boîte de dialogue.
Résumé de l’activité 3
Dans cette activité, vous avez
- Appliqué une contrainte structurelle fixe au bloc poussoir dans toutes les directions sauf la direction X
- Déterminé la vitesse nécessaire sur le bloc poussoir
- Appliqué une vitesse imposée au bloc poussoir afin qu'il se déplace dans la direction +X
- Défini la courbe de multiplicateur qui contrôle la vitesse de translation imposée du bloc poussoir, de sorte que le bloc s'arrête avant de toucher le rouleau.