Exercice 4 : application d’une translation imposée et définition de contacts
Dans cette exercice, vous appliquez une translation imposée de 1,6 mm à la plaque supérieure, vers le bas et pendant 1 s, pour la déplacer dans la direction -Y. Vous allez ensuite ajuster la configuration de l’étude pour réduire le temps d’analyse. Pour terminer la configuration de l’étude, vous allez réaliser les opérations suivantes :
Définir la face sur laquelle appliquer la translation imposée
Appliquer une translation imposée à la plaque supérieure
Définir la courbe de multiplicateur qui contrôle la translation imposée
Définir les paramètres globaux des contacts pour désactiver le contact personnel
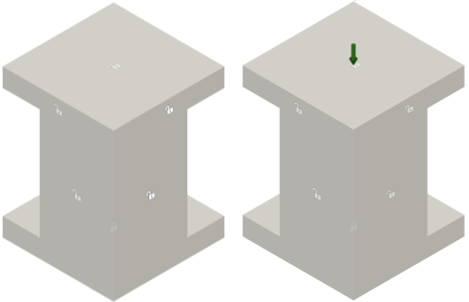
Modèle avant l’application d’une contrainte de translation imposée (à gauche) et après l’application d’une contrainte de translation imposée (à droite).
Conditions préalables
- L’exercice 3 est terminé.
Étapes
Définissez la face supérieure de la plaque supérieure comme emplacement pour appliquer une translation imposée.
Remarque : dans Fusion, les translations imposées sont considérées comme des contraintes plutôt que des charges, car elles contrôlent la position d’un objet. Cette translation pousse les pièces ensemble.Cliquez sur
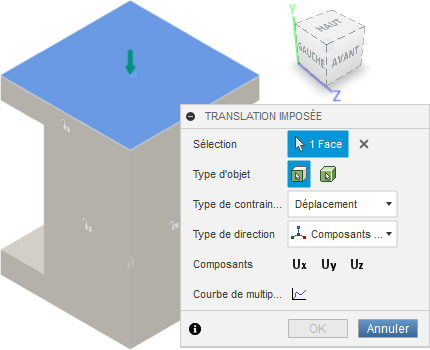
 (espace de travail Simulation > onglet Configuration > panneau Contraintes > Translation imposée) pour ouvrir la boîte de dialogue Translation imposée.
(espace de travail Simulation > onglet Configuration > panneau Contraintes > Translation imposée) pour ouvrir la boîte de dialogue Translation imposée.Vérifiez que le Type d’objet est défini sur
 Faces.
Faces.Vérifiez que le Type de contrainte est défini sur Déplacement.
Cliquez sur la face supérieure de la plaque supérieure pour l’identifier comme Sélection.
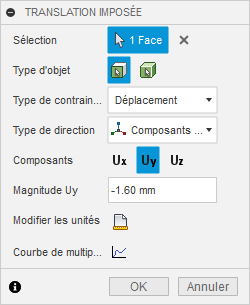
Appliquez une translation imposée de 1,6 mm dans la direction -Y sur la face supérieure de la plaque supérieure.
Vérifiez que le Type de direction est défini sur Composants (x, y, z).
Cliquez sur le composant Uy pour le sélectionner.
Saisissez une valeur de -1,60 mm dans le champ Magnitude Uz.
Définissez la courbe de multiplicateur qui contrôle la translation imposée à l’aide des valeurs indiquées dans l’image ci-dessous :
Dans la boîte de dialogue Translation imposée, cliquez sur
 Courbe de multiplicateur.
Courbe de multiplicateur.Entrez 1 dans la colonne Multiplicateur associée au pas 1 et 0,75 dans la colonne Multiplicateur de la ligne suivante. L’étape est incrémentée automatiquement.
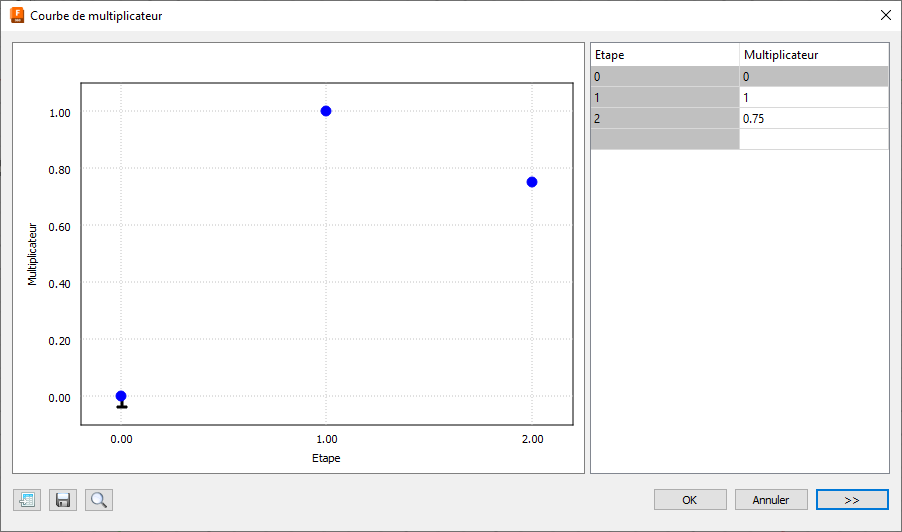 Remarque : cette courbe applique la totalité du déplacement de 1,6 mm sur le premier pas, puis revient au deuxième pas à 1,2 mm. Vous avez défini 10 intervalles de résultats par pas au début ; avec 2 pas, ce qui produit 20 pas de résultats.
Remarque : cette courbe applique la totalité du déplacement de 1,6 mm sur le premier pas, puis revient au deuxième pas à 1,2 mm. Vous avez défini 10 intervalles de résultats par pas au début ; avec 2 pas, ce qui produit 20 pas de résultats.Cliquez sur OK pour accepter la courbe.
Cliquez sur OK pour appliquer la translation imposée et fermer la boîte de dialogue.
Détectez automatiquement les paires de contact entre les corps.
Dans les études de simulation, les paires de contact sont définies entre les corps, et non entre les points, arêtes ou faces individuels, et elle sont détectées automatiquement. Un contact personnel, où une pièce peut se déformer et entrer en contact avec une autre zone d’elle-même, est pris en charge.
Cliquez sur
 (espace de travail Simulation > onglet Configuration > panneau Contacts > Contacts globaux) pour ouvrir la boîte de dialogue Contacts globaux.
(espace de travail Simulation > onglet Configuration > panneau Contacts > Contacts globaux) pour ouvrir la boîte de dialogue Contacts globaux.Vérifiez que l’option Contact de séparation globale est activée et que l’option Contact lié de proximité est désactivée.
Remarque : l’interaction de contact de séparation se produit à chaque endroit où les deux pièces se touchent pendant la simulation. Les pièces peuvent glisser les unes le long des autres et se séparer librement les unes des autres, mais elles ne sont pas autorisées à se traverser les unes les autres.Développez Paramètres avancés et vérifiez que l’option Autoriser le contact personnel est sélectionnée.
Cliquez sur Générer pour créer les paires de contact et fermer la boîte de dialogue.
Supprimez les contacts personnels.
Dans le cadre de cet exercice, puisque nous ne prévoyons aucun contact personnel, nous pouvons le désactiver pour réduire le temps de résolution.
Cliquez sur
 (espace de travail Simulation > onglet Configuration > panneau Contacts > Gérer les contacts) pour ouvrir la boîte de dialogue Gestionnaire de contacts de simulation d’événements.
(espace de travail Simulation > onglet Configuration > panneau Contacts > Gérer les contacts) pour ouvrir la boîte de dialogue Gestionnaire de contacts de simulation d’événements.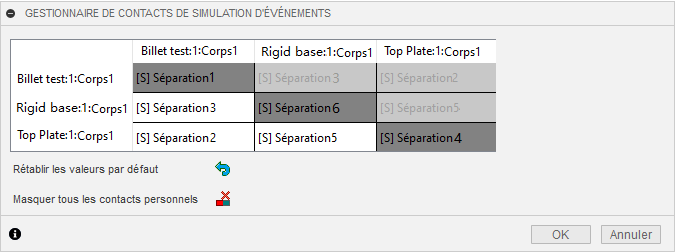 Remarque : il existe trois corps dans ce modèle, donc la matrice est 3x3. Les relations étant symétriques, les cellules situées dans la moitié supérieure de la matrice ne peuvent pas être sélectionnées.
Remarque : il existe trois corps dans ce modèle, donc la matrice est 3x3. Les relations étant symétriques, les cellules situées dans la moitié supérieure de la matrice ne peuvent pas être sélectionnées.Cliquez sur
 Masquer tous les contacts personnels.
Masquer tous les contacts personnels.Notez qu’une ligne est dessinée à travers chacun des contacts en diagonale qui représentent un contact personnel.
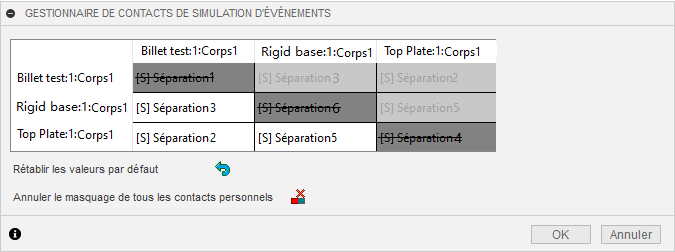
Cliquez sur chacune des trois cellules restantes pour mettre en surbrillance dans la zone de dessin les corps que chaque contact représente.
Cliquez sur OK pour fermer la boîte de dialogue Gestionnaire de contacts de simulation d’événements et supprimez les paires de contacts sélectionnées.
Résumé de l’exercice 4
Dans cet exercice, vous avez :
- défini la face sur laquelle appliquer la translation imposée ;
- appliqué une translation imposée à la plaque supérieure ;
- défini la courbe de multiplicateur qui contrôle la translation imposée ;
- défini les paramètres des contacts globaux pour désactiver le contact personnel.