Attività 6: Ottimizzare la configurazione, risolvere ed esaminare i risultati
In questa attività l'utente genererà i contatti, quindi ne ottimizzerà le condizioni in modo da ridurre il tempo di analisi. Deve essere presente un attrito sufficiente nel contatto lungo il quale il rullo spinge la soletta in acciaio dopo che il blocco spintore si è arrestato.
Il contatto viene generato inizialmente tra tutti i corpi. Per ridurre il tempo di analisi, è possibile sopprimere i contatti improbabili come, in questo caso, il contatto automatico. Poiché il blocco spintore e il rullo non entrano mai in contatto tra di loro, anche questa coppia di contatto può essere soppressa. Dopo aver ottimizzato l'impostazione, è possibile risolvere l'analisi ed esaminare i risultati.
In questa attività si apprenderà come effettuare le operazioni seguenti:
- Generare contatti con attrito sufficiente per spostare la soletta in acciaio sotto il rullo
- Esaminare le condizioni dei contatti ed eliminare quelli che è improbabile che si verifichino in questa analisi in modo da ridurre il tempo di soluzione
- Rivedere la verifica preliminare dell'impostazione per garantire che l'analisi sia pronta per la risoluzione
- Risolvere l'analisi
- Esaminare i risultati
Prerequisiti
- Attività 5 completata.
Passi
Generare il contatto tra tutti i corpi utilizzando un Coefficiente di attrito di default di 0.3.
- Fare clic su
 (area di lavoro Simulazione > scheda Setup > gruppo Contatti > Contatti globali) per aprire la finestra di dialogo Contatti globali.
(area di lavoro Simulazione > scheda Setup > gruppo Contatti > Contatti globali) per aprire la finestra di dialogo Contatti globali. - Nella finestra di dialogo Contatti globali, impostare il Coefficiente di attrito di default su 0.3.
- Fare clic su Genera per chiudere la finestra di dialogo e generare i contatti.
- Fare clic su
Sopprimere i contatti automatici e il contatto tra il blocco spintore e il rullo.
Nel browser, posizionare il cursore su
 Contatti, quindi fare clic su
Contatti, quindi fare clic su  Modifica per aprire la finestra di dialogo Gestore dei contatti di simulazione evento. Viene visualizzata una matrice di tutte le coppie di contatto tra tutti i corpi nel modello
Modifica per aprire la finestra di dialogo Gestore dei contatti di simulazione evento. Viene visualizzata una matrice di tutte le coppie di contatto tra tutti i corpi nel modello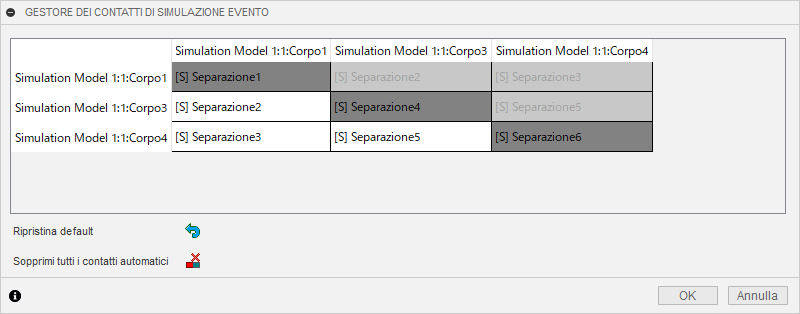 Nota: In questo modello sono presenti tre corpi, pertanto la matrice è 3x3. Poiché le relazioni sono simmetriche, le celle nella metà superiore della matrice non possono essere selezionate.
Nota: In questo modello sono presenti tre corpi, pertanto la matrice è 3x3. Poiché le relazioni sono simmetriche, le celle nella metà superiore della matrice non possono essere selezionate.Fare clic su
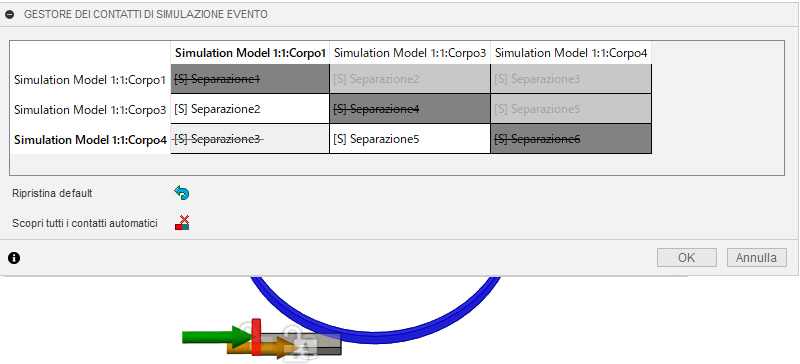
 Sopprimi tutti i contatti automatici
Sopprimi tutti i contatti automaticiNotare che viene tracciata una linea che attraversa ciascun contatto diagonale che rappresenta un contatto automatico.
Fare clic su ciascuna delle tre restanti celle per evidenziare i corpi rappresentati da ciascun contatto nell’area grafica; dopodiché, per il contatto che rappresenta il corpo spintore e il rullo, fare clic con il pulsante destro del mouse nella cella e scegliere Sopprimi contatto.
Fare clic su OK per chiudere la finestra di dialogo Gestore dei contatti di simulazione evento e sopprimere le coppie di contatto selezionate.
Verificare lo stato di verifica preliminare e determinare se l'analisi è pronta per l'esecuzione.
Fare clic su
 (area di lavoro Simulazione > scheda Setup > gruppo Risolvi > Verifica preliminare) per aprire la finestra di dialogo Verifica preliminare.
(area di lavoro Simulazione > scheda Setup > gruppo Risolvi > Verifica preliminare) per aprire la finestra di dialogo Verifica preliminare.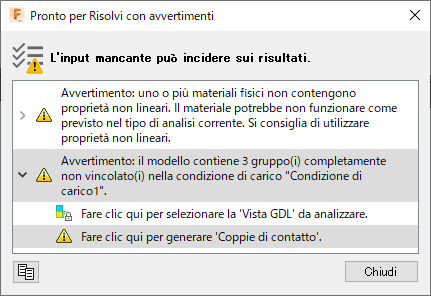
Fusion Simulation supporta più tipi di studi di simulazione impliciti per cui il modello deve essere completamente vincolato. Questo significa che tutte le parti del modello devono essere vincolate per escludere modalità rigide. La simulazione evento è una tecnica esplicita che supporta le modalità corpo rigido e la natura dei vincoli di contatti tra le parti limita tipicamente queste modalità. In questo modello, anche se la soletta in acciaio presenta una serie di condizioni boundary che permettono alla stessa di spostarsi liberamente nella direzione X, il contatto tra la soletta in acciaio e il rullo, e il contatto tra il blocco spintore e la soletta in acciaio vincolano completamente questa modalità corpo rigido.
Nota: Questi problemi non influiscono sulla formulazione esplicita trovata in Simulazione evento, pertanto è possibile ignorarli e risolvere l'analisi.Fare clic su Chiudi per chiudere la finestra di dialogo di verifica preliminare.
Risolvere l'analisi.
Fare clic su
 (area di lavoro Simulazione > scheda Setup > gruppo Risolvi > Risolvi) per aprire la finestra di dialogo Risolvi.
(area di lavoro Simulazione > scheda Setup > gruppo Risolvi > Risolvi) per aprire la finestra di dialogo Risolvi.Verificare che lo studio sia selezionato, quindi fare clic su Risolvi 1 studio.
Al termine dell'analisi, fare clic su Chiudi per chiudere la finestra di dialogo Stato processo.
Esaminare i risultati della deformazione.
Riepilogo attività 6
In questa attività, l'utente eseguirà le seguenti operazioni
- Generare coppie di contatti
- Esaminare le condizioni dei contatti ed eliminare quelli che è improbabile che si verifichino in questa analisi
- Rivedere la verifica preliminare dell'impostazione per garantire che l'analisi sia pronta per la risoluzione
- Risolvere l'analisi
- Esaminare i risultati.