アクティビティ 2: モデリング拘束を定義する
このアクティビティでは、モデリング拘束を定義して、シェイプ最適化デザインが特定のデザイン上の期待を満たしていることを確認します。
オブジェクトをつかむために、グリッパー アームが他の 1 つまたは複数のアームとともにロボットによって使用されます。新しいアーム デザインでは、同じ重量を持ち上げて移動することができる必要があります。アームは 2 つのピンで固定されており、シミュレーションではこの拘束を考慮する必要があります。アームのこれらの 2 つの領域(ピンのボルト穴とアームのグリップ面)は、新しいデザインにおいて保持する必要があります。さらに、新しいデザインでは、元のデザインと同様に厚さを対称にする必要があります。
このアクティビティの内容
- シミュレーション目的で、ピン拘束を使用してモデルを拘束します。
- グリップ サーフェスに荷重を適用して、デザインで圧縮荷重を処理できるようにします。
- 両方のボルト穴の周囲の材料を保持して、ピンが予期したとおりに機能できるようにします。
- 厚さを使用して対称面を作成し、新しいデザインで元のデザインと同様に厚さが対称になるようにします。
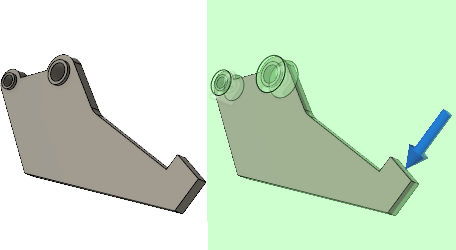
モデリング拘束を適用する前のグリッパー アーム(左)、モデリング拘束を適用した後(右)。
前提条件
- アクティビティ 1 を完了していること。
手順
各ボルト穴の内側のサーフェスにピン拘束を適用します([径方向]と[軸方向])。
 ([シミュレーション]作業スペース > [設定]タブ > [拘束]パネル > [構造拘束])をクリックして、[構造拘束]ダイアログを開きます。
([シミュレーション]作業スペース > [設定]タブ > [拘束]パネル > [構造拘束])をクリックして、[構造拘束]ダイアログを開きます。- [タイプ]を
 [ピン]に設定します。
[ピン]に設定します。 - 2 つのボルト穴それぞれの内側のサーフェスを、2 つのターゲット面として選択します。
 [径方向]と
[径方向]と  [軸方向]が選択されていることを確認します。
[軸方向]が選択されていることを確認します。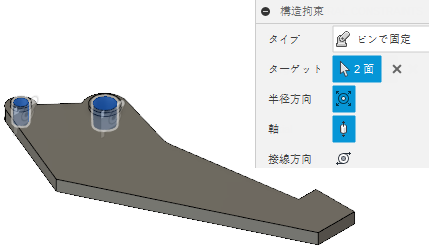
- [OK]をクリックしてコマンドを確定し、[構造拘束]ダイアログを閉じます。
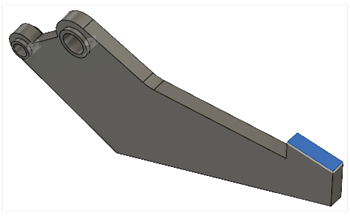
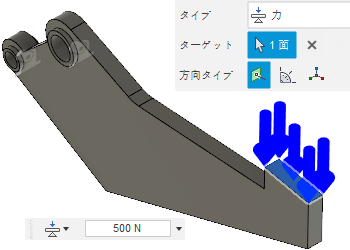
グリップ サーフェスに対して、法線方向に力 500 N を適用します。オブジェクトをつかむために、グリッパー アームがロボットによって使用されます。生成した形状は、グリップ サーフェスに対する圧縮荷重を処理する必要があります。
 ([シミュレーション]作業スペース > [設定]タブ > [荷重]パネル > [構造荷重])をクリックして、[構造荷重]ダイアログを開きます。
([シミュレーション]作業スペース > [設定]タブ > [荷重]パネル > [構造荷重])をクリックして、[構造荷重]ダイアログを開きます。- [構造荷重]ダイアログで、[タイプ]を
 [力]に、[方向タイプ]を
[力]に、[方向タイプ]を  [法線]に設定します。
[法線]に設定します。 - グリップ サーフェスをクリックして、ターゲット面として選択します。
- 500 N の荷重を入力します。
- 荷重が圧縮して(サーフェスに向かって)作用していることを確認し、[OK]をクリックします。
大きいボルト穴の周囲に 8 mm の材料、小さいボルト穴の周囲に 5.5 mm の材料を保持し、ピンが予期したとおりに機能できるようにします。グリッパー アームは 2 つのピンで固定されます。
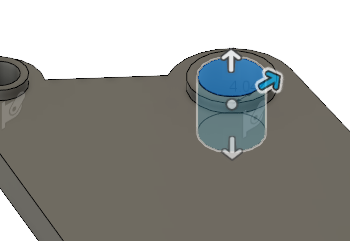
 ([シミュレーション]作業スペース > [設定]タブ > [シェイプ最適化]パネル > [領域を保持])をクリックして、[領域を保持]ダイアログを開きます。
([シミュレーション]作業スペース > [設定]タブ > [シェイプ最適化]パネル > [領域を保持])をクリックして、[領域を保持]ダイアログを開きます。- モデルを開いた後にモデルのビューポイントを変更した場合は、ViewCube の上にある
 [ホーム]ビューをクリックして、既定のアイソメ ビューを復元します。
[ホーム]ビューをクリックして、既定のアイソメ ビューを復元します。 - 大きいボルト穴の内側のサーフェスをクリックして、図心の位置の面として選択します。
- [半径]を 8 mm に調整します。
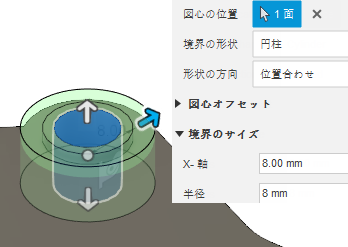
- [OK]をクリックしてコマンドを確定し、[領域を保持]ダイアログを閉じます。
- 小さいボルト穴に手順 a から e を繰り返し、半径を 5.5 mm に調整します。
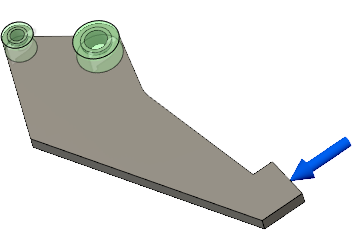
厚さを使用して対称面を作成し、最適化された形状で元のグリッパー アーム デザインと同様に厚さが対称になるようにします。
 ([シミュレーション]作業スペース > [設定]タブ > [シェイプ最適化]パネル > [対称面])をクリックして、[対称面]ダイアログを開きます。
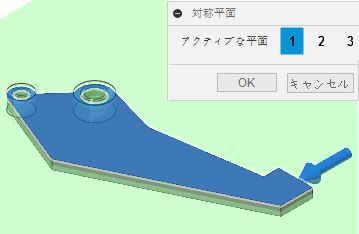
([シミュレーション]作業スペース > [設定]タブ > [シェイプ最適化]パネル > [対称面])をクリックして、[対称面]ダイアログを開きます。- グリッパー アームの上部サーフェスを選択します。
- [OK]をクリックしてコマンドを確定し、[対称面]ダイアログを閉じます。
アクティビティ 2 のサマリー
このアクティビティの内容
- シミュレーション目的で、ピン拘束を使用してモデルを拘束しました
- グリップ サーフェスに荷重を適用して、デザインで圧縮荷重を処理できるようにしました
- 両方のボルト穴の周囲の材料を保持して、ピンが予期したとおりに機能できるようにしました。
- 厚さを使用して対称平面を作成し、新しいデザインで元のデザインと同様に厚さが対称になるようにしました。