작업 2: 모델링 구속조건 정의
이 작업에서는 모델링 구속조건을 정의하여 쉐이프 최적화 디자인이 특정 디자인 기대치를 충족하도록 합니다.
그리퍼 암은 하나 이상의 다른 암이 있는 로봇이 객체를 가져오는 데 사용됩니다. 새 암 디자인은 동일한 무게를 들어 올리고 이동할 수 있어야 합니다. 암은 두 개의 고정으로 제자리에 고정되며 시뮬레이션 중에 이 구속조건을 고려해야 합니다. 암의 두 영역인 고정의 볼트 구멍과 암의 그립 면은 새 디자인에서 보존되어야 합니다. 또한 원래 디자인과 같이 새 디자인을 두께 방향으로 대칭되게 하려고 합니다.
이 작업에서는 다음을 수행합니다.
- 고정 구속조건을 사용하여 시뮬레이션을 위해 모형 구속
- 디자인이 압축 하중을 처리할 수 있도록 그립 곡면에 하중 적용
- 고정이 예상대로 작동할 수 있도록 두 볼트 구멍 주위에 재질 유지
- 새 디자인이 원래 디자인과 같이 두께 방향으로 대칭되도록 두께 방향으로 대칭 평면 작성
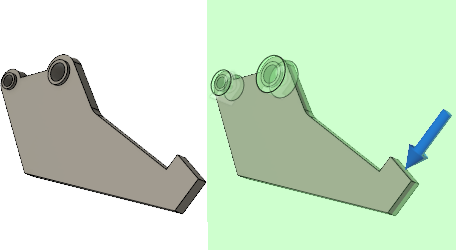
모델링 구속조건을 적용하기 전 그리퍼 암(왼쪽) 및 모델링 구속조건을 적용한 후 그리퍼 암(오른쪽)
필수 조건
- 작업 1이 완료되었습니다.
단계
반지름 및 축 방향에서 각 볼트 구멍의 내부 곡면에 고정 구속조건을 적용합니다.
 (시뮬레이션 작업공간 > 설정 탭 > 구속조건 패널 > 구조적 구속조건)을 클릭하여 구조적 구속조건 대화상자를 엽니다.
(시뮬레이션 작업공간 > 설정 탭 > 구속조건 패널 > 구조적 구속조건)을 클릭하여 구조적 구속조건 대화상자를 엽니다.- 유형을
 고정으로 설정합니다.
고정으로 설정합니다. - 두 개의 볼트 구멍 각각의 내부 곡면을 두 개의 대상 면으로 선택합니다.
 반지름 및
반지름 및  축 방향이 선택되었는지 확인합니다.
축 방향이 선택되었는지 확인합니다.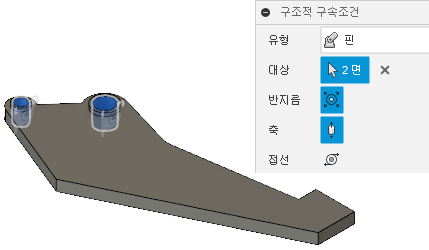
- 확인을 클릭하여 명령을 승인하고 구조적 구속조건 대화상자를 닫습니다.
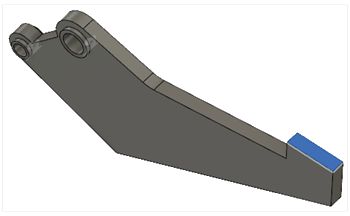
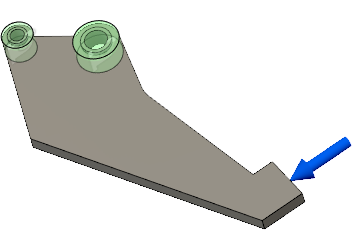
그립 곡면에서 법선 방향으로 500N의 힘을 적용합니다. 그리퍼 암은 로봇이 객체를 잡는 데 사용됩니다. 생성한 쉐이프는 그립 곡면에서 압축 하중을 처리해야 합니다.
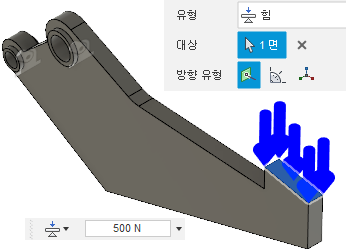
 (시뮬레이션 작업공간 > 설정 탭 > 하중 패널 > 구조 하중)을 클릭하여 구조 하중 대화상자를 엽니다.
(시뮬레이션 작업공간 > 설정 탭 > 하중 패널 > 구조 하중)을 클릭하여 구조 하중 대화상자를 엽니다.- 구조 하중 대화상자에서 유형을
 힘으로 설정하고 방향 유형을
힘으로 설정하고 방향 유형을  법선으로 설정합니다.
법선으로 설정합니다. - 그립 곡면을 클릭하여 대상 면으로 선택합니다.
- 500N의 하중을 입력합니다.
- 하중이 압축 상태(곡면 방향)인지 확인하고 확인을 클릭합니다.
큰 볼트 구멍 주위에서 8mm 재질을 유지하고 작은 구멍 주위에서는 5.5mm 재질을 유지하여 고정이 예상대로 작동할 수 있도록 합니다. 그리퍼 암은 두 개의 고정에 의해 제자리에 고정됩니다.
 (시뮬레이션 작업공간 > 설정 탭 > 쉐이프 최적화 패널 > 영역 유지)을 클릭하여 영역 유지 대화상자를 엽니다.
(시뮬레이션 작업공간 > 설정 탭 > 쉐이프 최적화 패널 > 영역 유지)을 클릭하여 영역 유지 대화상자를 엽니다.- 모형을 연 후 모형 관측점을 변경한 경우 ViewCube 위의
 홈 뷰를 클릭하여 기본 등각투영 뷰를 복원합니다.
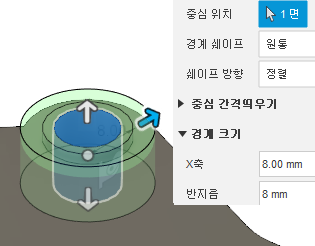
홈 뷰를 클릭하여 기본 등각투영 뷰를 복원합니다. - 큰 볼트 구멍의 내부 곡면을 클릭하여 중심 위치 면으로 선택합니다.
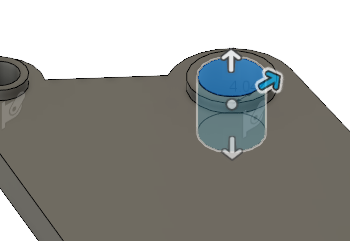
- 반지름을 8mm로 조정합니다.
- 확인을 클릭하여 명령을 수락하고 영역 유지 대화상자를 닫습니다.
- 작은 볼트 홀에 대해 a~e 단계를 반복하여 반지름을 5.5mm로 조정합니다.
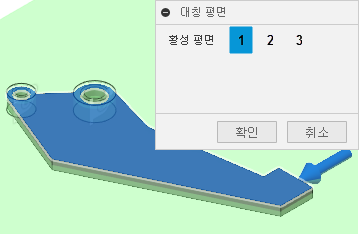
최적화된 쉐이프가 원래의 그리퍼 암 디자인과 같이 두께 방향으로 대칭되도록 두께 방향으로 대칭 평면을 작성합니다.
 (시뮬레이션 작업공간 > 설정 탭 > 쉐이프 최적화 패널 > 대칭 평면)을 클릭하여 대칭 평면 대화상자를 엽니다.
(시뮬레이션 작업공간 > 설정 탭 > 쉐이프 최적화 패널 > 대칭 평면)을 클릭하여 대칭 평면 대화상자를 엽니다.- 그리퍼 암의 상단 곡면을 선택합니다.
- 확인을 클릭하여 명령을 승인하고 대칭 평면 대화상자를 닫습니다.
작업 2 요약
이 작업에서는 다음을 수행했습니다.
- 고정 구속조건을 사용하여 시뮬레이션을 위해 모형 구속
- 디자인이 압축 하중을 처리할 수 있도록 그립 곡면에 하중 적용
- 고정이 예상대로 작동하도록 두 볼트 구멍 주위에 재질 유지
- 원래 디자인과 같이 두께 방향으로 대칭되도록 두께 방향으로 대칭 평면 작성