
Remote force loads in the Simulation workspace
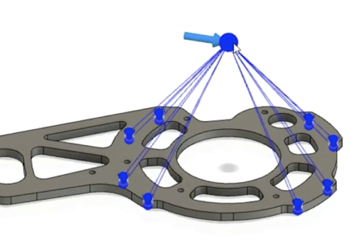
A Remote Force adds a load from a point in space that is not on the model. You define the target face(s) on the model, the direction in which you want the force to act, the load magnitude, and the point in space from which the load is acting. A remote force is ideal when the object in space that it represents is unimportant to model, or too difficult to model. For example, the effect of wind on a mast, or force lifting a heavy object.
| Study Types that offer this load option | |
|---|---|
 Thermal stress study Thermal stress study |
 Static stress study Static stress study |
 Modal frequencies study Modal frequencies study |
 Structural buckling study Structural buckling study |
 Shape optimization study Shape optimization study |
 Nonlinear static stress study Nonlinear static stress study |
The default direction of a remote force is Normal to the first selected face.
In Fusion, you define the force direction of remote loads in one of the following ways:
 Normal : The load direction is normal to the faces where the load is applied. For forces applied to curved faces, the vector direction varies to remain normal at every point along each face.
Normal : The load direction is normal to the faces where the load is applied. For forces applied to curved faces, the vector direction varies to remain normal at every point along each face. Angle (delta) : This option uses a relative X Angle, Y Angle, and Z Angle to orient the load direction. If you select a second, perpendicular face, the angle is relative to the direction normal to the first selected face. If a Direction Reference is selected, the angle is based on the reference, and not the target face.
Angle (delta) : This option uses a relative X Angle, Y Angle, and Z Angle to orient the load direction. If you select a second, perpendicular face, the angle is relative to the direction normal to the first selected face. If a Direction Reference is selected, the angle is based on the reference, and not the target face. Vectors (x,y,z) : The load direction is defined by the global force components (Fx, Fy, and Fz) that you specify.
Vectors (x,y,z) : The load direction is defined by the global force components (Fx, Fy, and Fz) that you specify.