| Přístup: |
V dialogu Vložit spoj klikněte na ikonu Zobrazit tabulku spojů. |
Kliknutím na obrázky v horní části dialogu přejdete z jedné kategorie spojů do druhé.
Standardní spoje
Standardní spoje jsou nejčastěji používanými spoji. Tyto spoje jsou založeny na různých kombinacích rotačních a posuvných stupňů volnosti. V této kategorii jsou k dispozici následující spoje:
![]() Otáčivý
Otáčivý
![]() Prizmatický
Prizmatický
![]() Válcový
Válcový
![]() Kulový
Kulový
![]() Rovinný
Rovinný
![]() Bod-čára
Bod-čára
![]() Bod-čára
Bod-čára
![]() Bod-rovina
Bod-rovina
![]() Prostorový
Prostorový
![]() Svařování
Svařování
Otočné spoje
Přestože z obrázků vyplývá, že je možné použít spoje k simulaci mechanismů s ozubenými koly, skutečné zabírání zubů ozubených kol není zdůvodněno. Metoda stanovuje poměr založený na geometrii zvolené v poloměru efektivního valení ozubených kol.
![]() Valivé: Válec na rovině
Valivé: Válec na rovině
![]() Valivé: Válec na válci
Valivé: Válec na válci
![]() Valivé: Válec ve válci
Valivé: Válec ve válci
![]() Valivé: Křivka válce
Valivé: Křivka válce
![]() Řemen
Řemen
![]() Valivé: Kužel na rovině
Valivé: Kužel na rovině
![]() Valivé: Kužel na kuželu
Valivé: Kužel na kuželu
![]() Valivé: Kužel v kuželu
Valivé: Kužel v kuželu
![]() Šroub
Šroub
![]() Šnekové ozubené kolo
Šnekové ozubené kolo
Posuvné spoje
![]() Posuvné: Válec na rovině
Posuvné: Válec na rovině
![]() Posuvné: Válec na válci
Posuvné: Válec na válci
![]() Posuvné: Válec ve válci
Posuvné: Válec ve válci
![]() Posuvné: Křivka válce
Posuvné: Křivka válce
![]() Posuvné: Bodová křivka
Posuvné: Bodová křivka
Dotykový spoj
2D dotykový spoj je přesný. Zjišťuje vznik kolize, ale rovněž dovoluje vzniku separace. Plochy neobsahují žádné plošky a nedochází u nich k průniku a tak je méně pravděpodobné, že ve výsledcích dojde k anomáliím. Při práci s mechanismy jako jsou vačky a hnané součásti, použijte k přesnému prozkoumání chování mechanismu místo 3D dotykových spojů tyto spoje. V některých případech je pro dosažení odpovídajících výsledků nutné vytvořit na součásti dodatečnou geometrii nebo použít větší množství 2D spojů.
![]() 2D dotyk
2D dotyk
Úprava geometrie k dosažení plynulé, „vyhlazené“ smyčky.
K zajištění vyhlazené nekonečné smyčky pro algoritmus 2D dotyku (ke zlepšení výpočtu) je provedena mírná úprava geometrie. Veškeré nespojitosti v profilu jsou vyhlazeny, aby byla získána spojitá smyčka, která aplikaci umožní rychlé vyřešení dotyku. V následujícím příkladu jsou znázorněny operace, které probíhají v aplikaci.
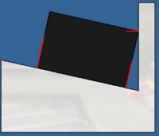 |
Jako příklad je uveden hranol s rovinnými plochami, který se dotýká další komponenty, kde některé plochy nejsou rovnoběžné s plochami hranolu. Z určité vzdálenosti se vektory dotyku (červené) jeví podle očekávání. |
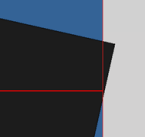 |
Pokud přiblížíme oblast dotyku s nerovnoběžnými plochami, zpozorujeme v dotyku nepatrné překrytí. |
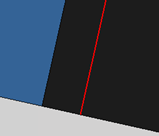 |
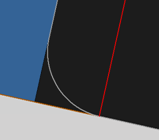
Přiblížíme-li oblast dotyku s rovnoběžnými plochami, uvidíme situaci zobrazenou vlevo. |
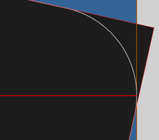 |
Ta je způsobena tím, že dynamická simulace automaticky vytváří zaoblení a vyhlazuje rohy, jak je patrné z obrázku vlevo. Jak je patrné, dotyk je s ohledem na zaoblení přesný. |
 |
V případě spoje paralelních rovin je dotyk rovněž vzhledem k zaoblení přesný. |
 |
Aplikace vytváří zaoblení následujícími metodami:
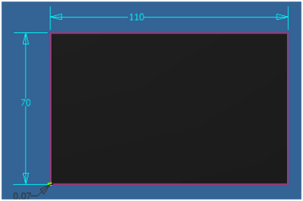
Bude-li dosaženo minimální hodnoty 5e-6 mm, vrchol nebude vyhlazen. V příkladu vlevo Lmin = 70 mm a úhel je kolmý (90 stupňů), proto se poloměr rovná 0,07 mm. |
Silové spoje
![]() 3D dotyk
3D dotyk
![]() Pružina/Tlumič/Zvedák
Pružina/Tlumič/Zvedák
| Typ | Parametry | Zobrazení | Komentář |
|---|---|---|---|
| Spirálová pružina | Tuhost, volná délka, tlumení | Spirálová pružina | Výchozí typ. Síla závisí na vzdálenosti mezi dvěma body (tuhost a volná délka) a rychlosti mezi nimi (tlumení). |
| Pružina | Tuhost, volná délka, tlumení | Samostatné složené válce | Stejná činnost jako u spirálové pružiny. Zobrazení se do jisté míry podobá talířové podložce a optimalizuje dobu zobrazení. |
| Pružinový tlumič | Tuhost, volná délka, tlumení | Spirálová pružina a tlumič | Stejná činnost jako u spirálové pružiny. Zobrazení se podobá tlumiči automobilu. |
| Tlumič | Tlumení | Tlumič | Pouze činnost tlumení. Síla závisí na rychlosti mezi dvěma body. |
| Zvedák | Vstupní diagram nebo konstanta | Tlumič | Aplikuje parametr síly přímo na model. Grafika znázorňuje mechanismus typu zvedáku. |